Robotiq Hand-E Gripper Instruction Manual
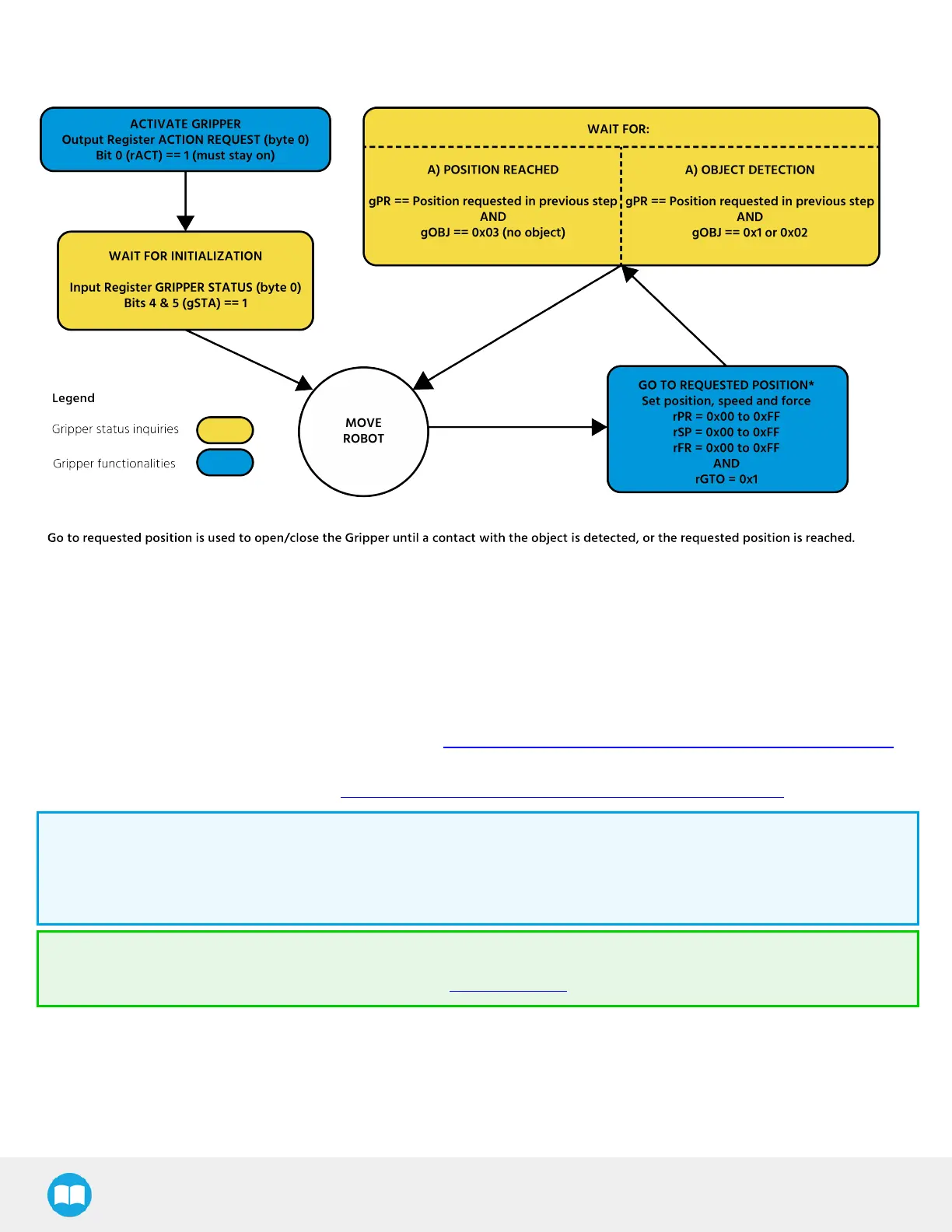
4.6. Control Logic Example
Fig. 4-2: Example of Gripper control logic with corresponding registers.
4.7. Modbus RTUCommunication
The gripper can be controlled by Modbus RTU directly with RS485 or over USB using the ACC-ADT-USB-RS485. This section is
intended to provide guidelines for setting up a Modbus master that will adequately communicate with the gripper.
For a general introduction to Modbus RTU and for details regarding the CRC algorithm, the reader is invited to read the Modbus over
serial line specification and implementation guide available at: http://www.modbus.org/docs/Modbus_over_serial_line_V1_02.pdf.
For debugging purposes, the reader is also invited to download one of many free Modbus scanners such as the CAS Modbus Scanner
from Chipkin Automation Systems available at: http://www.store.chipkin.com/products/tools/cas-modbus-scanner.
Info
Modbus RTU is a communication protocol based on a Big Endian byte order. Therefore, the 16-bit register addresses are
transmitted with the most significant byte first. However, the data port is in the case of Robotiq products based on the Little
Endian byte order. As such, the data parts of Modbus RTU messages are sent with the less significant byte first.
Tip
Modbus RTUspecifications and details can be found at www.modbus.org.
54