Robotiq Hand-E Gripper Instruction Manual
Command window
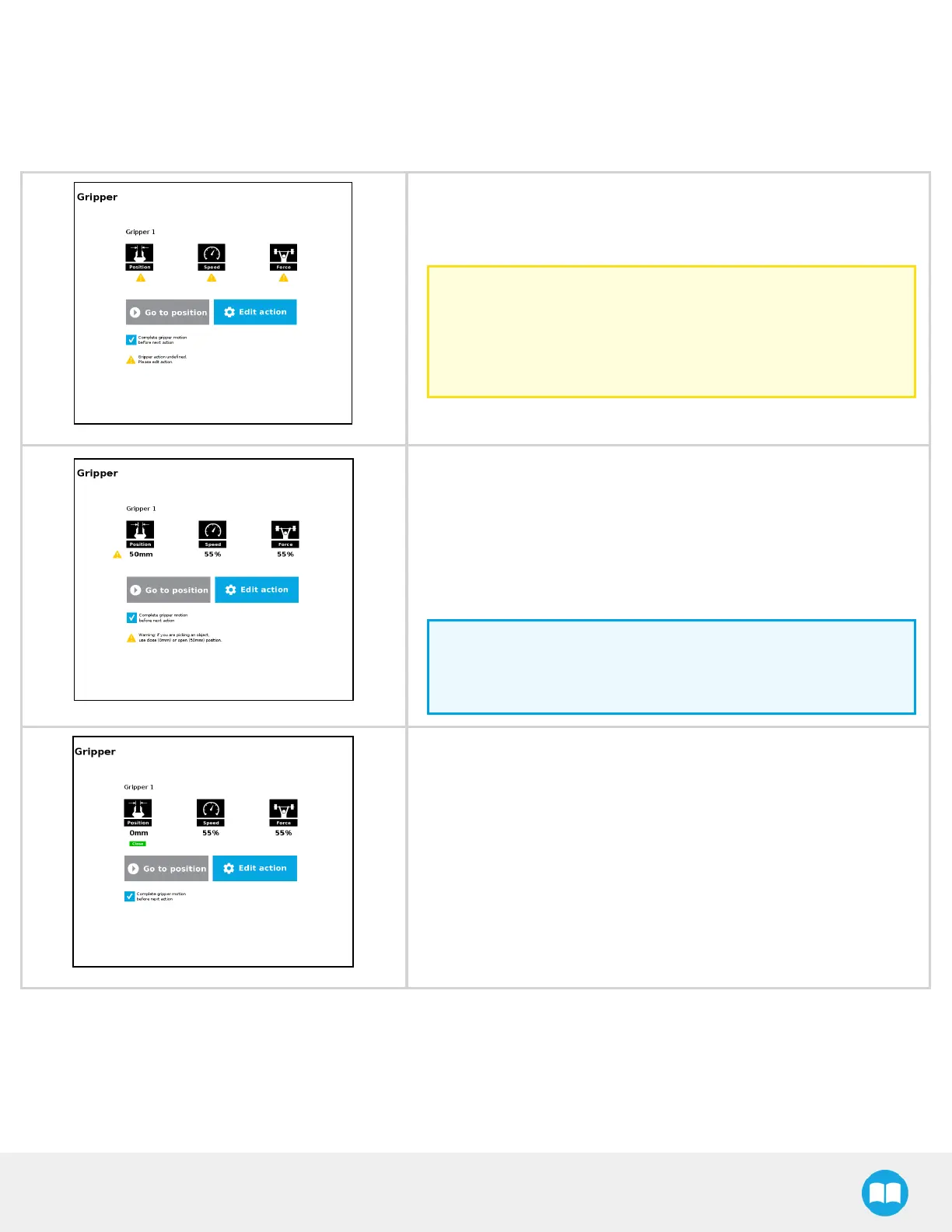
The Command window shows the requested action parameters for the Gripper node. Depending on the position, speed and force
parameters, warning messages may display.
To edit the Gripper node, tap Edit action (please refer to the Edit action screen section for more details).
When the node is not defined, the Command window shows warning
messages. Tap Edit action to modify the gripper’s action.
Caution
Tap the Go to position button prior to editing the action.
Whereas the command window displays the command that the
gripper should execute in this particular node, the Edit action
screen displays the current gripper position.
When the node requests the gripper to close/open, the Command window
warns that a partial opening/closing should not be performed for picking
an object.
l For positioning and partial movement of the gripper, moving to a spe-
cific position (between the fully open and fully close positions) issuitable.
l To pick an object, use the close (or open) actions along with the object
detectionfeature (please refer to the Edit action screen section).
Info
When the action is set for multiple grippers, the header lists the
selected grippers (e.g. Grippers 1,2,3,4)
When the gripper action is set to close, a green "Close" icon appears.
When the gripper action is set to open, a green "Open" icon appears.
89