Robotiq Hand-E Gripper Instruction Manual
5.2.2. Payload and Force
Friction Grip payload equation:
Where:
l W is payload weight
l F is the force applied by the gripper to the load
l C
f
is the friction coefficient between fingertip and part load
l S
f
is a safety factor to be determined by the robot integrator
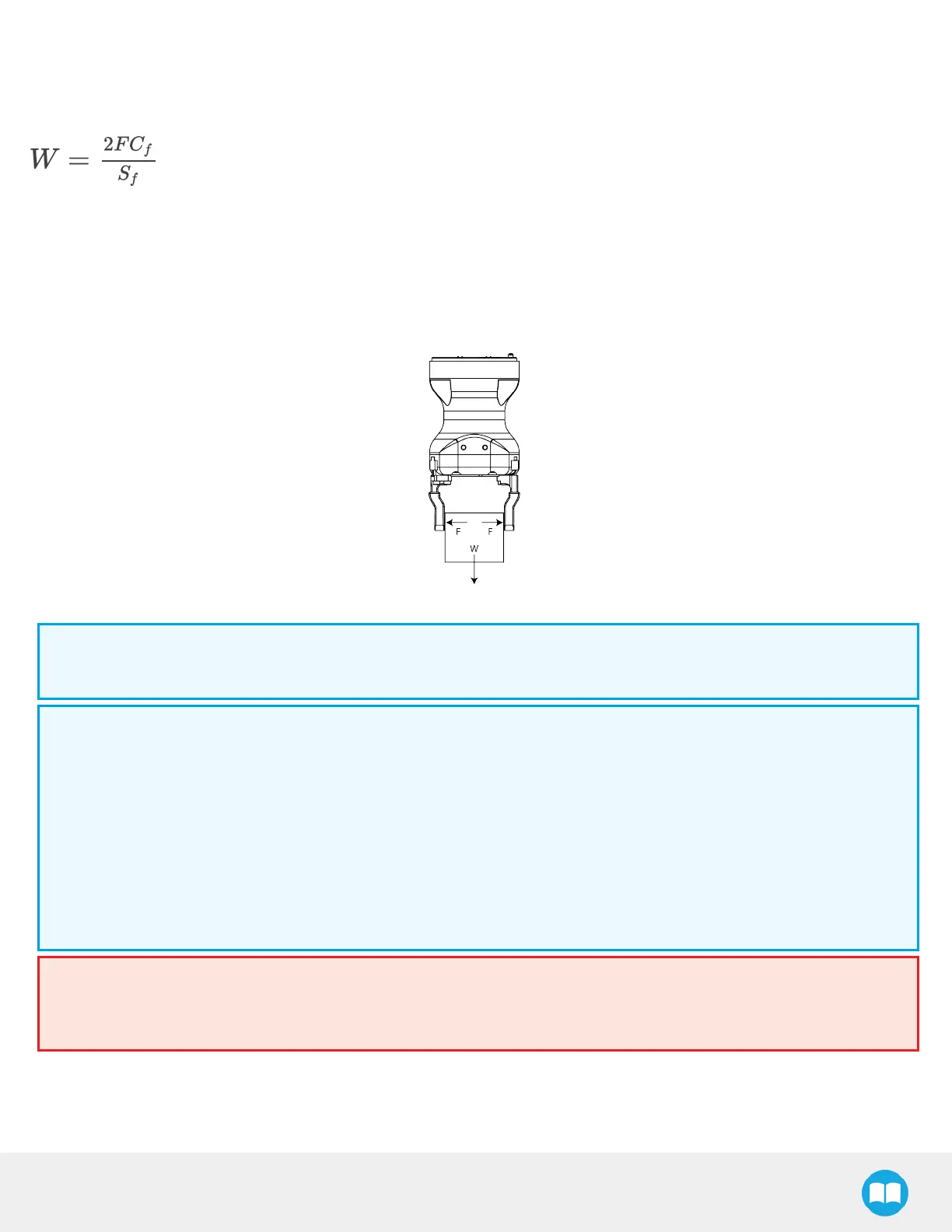
Fig. 5-9: Grasping force on Hand-E fingertips.
Info
The gripper has a power off brake. Without power, gripper fingers are blocked.
Info
For example, if the NBR overmolded fingertips (HND-FIN-MLD-KIT ) are used to lift a lubricated steel part (machine tending
with cutting oils), the friction coefficient would be 0.3 (tested static coefficient of friction).
The maximum weight with a safety factor of 2.4 using the maximum grasping force of 185 N would be:
W = (2 x 185 N x 0.3) / 2.4 = 46.25 N
This calculation means that a 4.7 kg part will be held by the gripper when not moving (standing still). When accelerating, the
payload will decrease.
The biggest factor in such calculations will always be the friction coefficient, we recommend testing the coefficient.
Warning
In payload calculations, take robot acceleration into account.
Robot emergency stops will lead to major deceleration velocities.
Maximum payload/External force vs. Custom finger design
The maximum payload force recommended depends on the distance on the Z-axis at which the force/payload (F) is applied when using
custom fingers on Hand-E.