Rockwell Automation Publication 2198-UM001D-EN-P - May 2014 163
Kinetix 5500 Safe Torque-off - Hardwired Safety Chapter 9
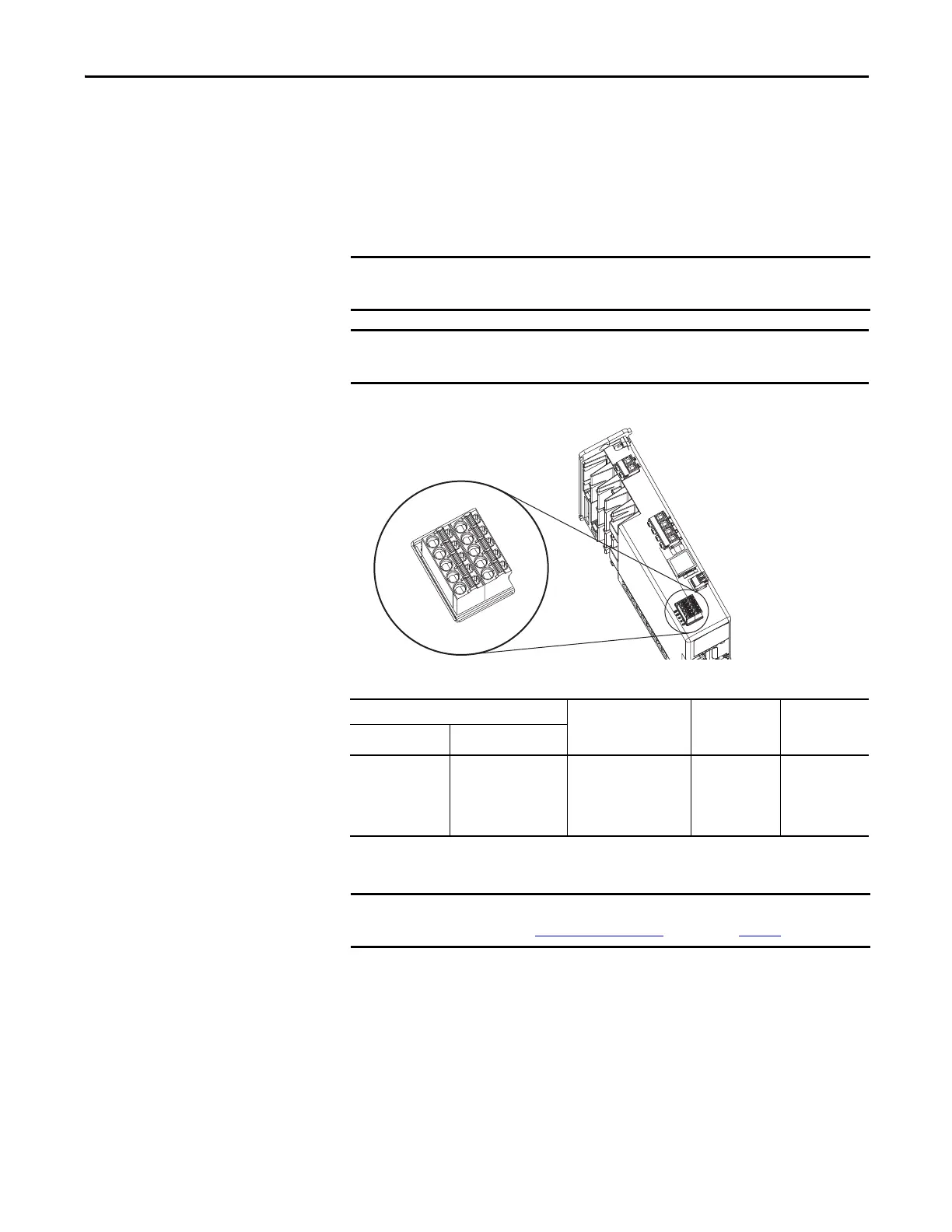
Safe Torque-off Wiring Requirements
The safe torque-off (STO) connector uses spring tension to secure the wire.
Depress the tab, along side each pin, to release the wire. Two rows of pins are
provided for drive-to-drive connections. Wire must be copper with 75 °C
(167 °F) minimum rating.
Figure 70 - Safe Torque-off (STO) Terminal Plug
Table 76 - Safe Torque-off (STO) Terminal Plug Wiring
The National Electrical Code and local electrical codes take precedence over the
values and methods provided.
Stranded wires must terminate with ferrules to prevent short circuits, per table
D.7 of EN ISO 13849-2.
1
2
3
4
5
SB+
SB-
S1
SC
S2
Remove
For DC
Bus Only
Kinetix 5500 Drive
Top View
Safe Torque-off (STO) Connector Recommended Wire
Size
mm
2
(AWG)
Strip Length
mm (in.)
Torque Value
N•m (lb•in)
Pin Signal
STO-1
STO-2
STO-3
STO-4
STO-5
SB+
SB-
S1
SC
S2
1.5…0.2
(16…24)
10 (0.25) N/A
To improve system performance, run wires and cables in the wireways as
established in Establishing Noise Zones
beginning on page 39.

 Loading...
Loading...








