SAMWONTECH
2nd Edition of TEMP2000_Series IM : July. 16. 2010 Page 39 / 87
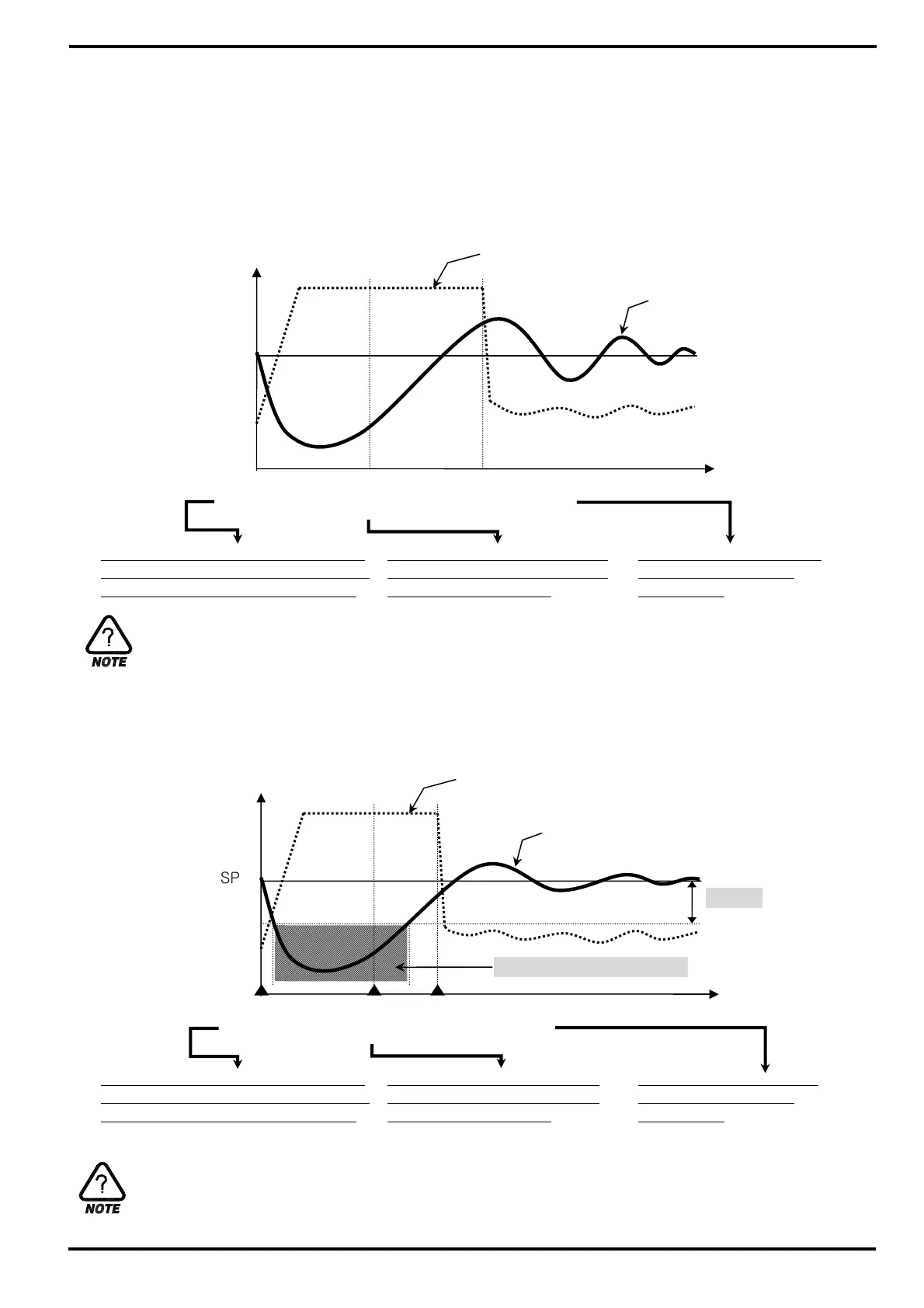
4.2.1.3 Over-Integral Prevention
▶ It is one of efficient method to control when disturbance occurs.
☞ This function suppresses overshoot due to over-integral when control output reaches to max value.
▶ It does not work when I=0 at PID set value.
☞ When there is no Over-Integral Prevention(ARW) function
▶ It takes time to dissolve the accumulated integral term even Disturbance is released, and
cause big Overshoot, and take time for NPV to be stable.
☞ When there is Over-Integral Prevention(ARW) function
▶ Reverse calculate the integral term until NPV enters ±P BAND, and reduce the integral term
dissolve time after disturbance released. It reduces Overshoot, and NPV is stabilized
quickly.
Target SP
▲ ▲
NPV starts decreasing by external shcok
Then, it makes MV increase and reach to
the peak point 100% output generating
In s
ite of clearin
disturbance,
MV should be lastin
100% b
acumulative integral term
MV starts decreasin
from
dissolving acumulatied
integral term.
Starting
Disturbance
Clearing
Disturbance
Breaking up
acumulated integral term
▲
Control Output (MV)
Current PV (NPV)
Control Output (MV)
▲ ▲
Target SP
Current PV (NPV)
▲
NPV starts decreasing by external shcok
Then, it makes MV increase and reach to
the peak point 100% output generating
In s
ite of clearin
disturbance,
MV should be lastin
100% b
acumulative integral term
Starting
Disturbance
Clearing
Disturbance
Breaking up
acumulated integral term
P BAND
MV starts decreasin
from
dissolving acumulatied
integral term.
Inverse calculation by ARW