9. SPECIFICATIONS
9-40
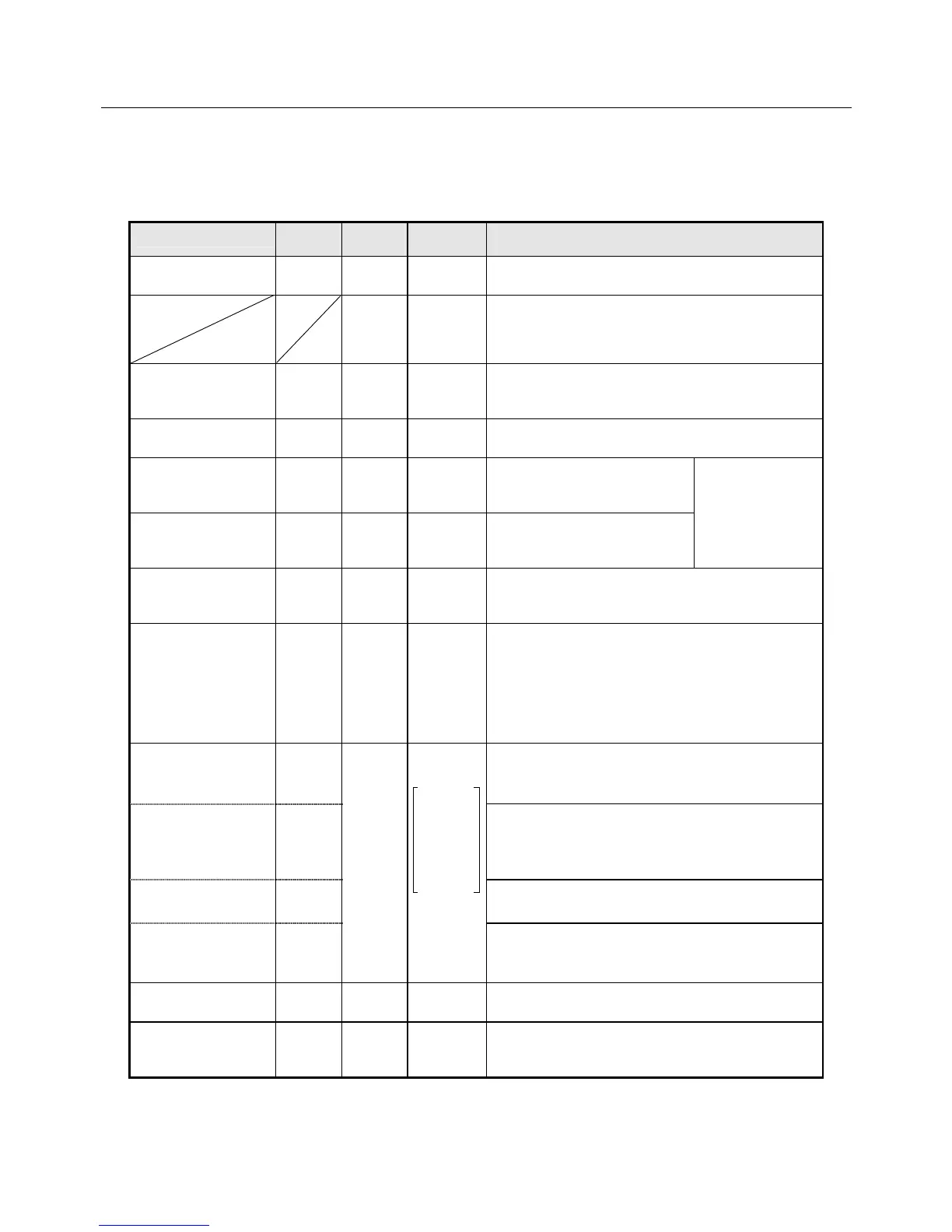
Table 9-8 General Specifications of Velocity Control Type Input Signal
(Wiring-saved Incremental Encoder) 1/2
Signal name Abbr.
Pin No.
*1
Circuit type
*2
General specification
Speed command VCMD 21 (20) Type 3 With a ±2 V input, the velocity becomes 1000 min
-
1
in
the standard setting (maximum input voltage ±10 V).
Torque
compen-
sation Torque
command
TCOMP
TCMD
22 (20) Type 3 With a ±2 V input, the velocity becomes the rated one
(TR) and is limited to the instantaneous maximum stall
torque.
Servo ON SON 37 (23) Type 1 Servo ON status is provided by closing the contact and
entering the velocity command input (VCMD) waiting
status.
Alarm reset RST 30 (23) Type 1 With this signal input, alarm code or alarm bit outputs
and error display are reset.
Forward revolution
current limit
PIL 18 (17) Type 4 The current is limited to the
rated current at +2 V (effective
when ILM is input).
Backward revolution
current limit
NIL 19 (17) Type 4 The current is limited to the
rated current with -2 V (effective
when ILM is input).
To enable the
external current
limit, Func1 bit10
must be set at "1".
Current limit permit ILM 31 (23) Type 1 The current is limited by closing the contact.
It is ineffective during JOG or overtravel (The limit
method is based on the Func1 parameter).
Forward revolution
overtravel
Backward revolution
overtravel
PROT
NORT
32 (23)
33 (23)
Type 1 Contact open status is provided upon occurrence of
overtravel. Input both forward and backward revolution
signals. When overtravel occurs, a 120% current limit
is automatically applied, making the speed of the side to
which this signal has been input zero.
(This function can be canceled or changed into an
a-contact input by setting the remote operator.)
External overheating
detection
EOH 35 (50)
36 (23)
Type 1 Normal operation while input is on.
The external overheating alarm state is assumed when
input is turned off.
Proportional control
(standard)
PCON
When the motor drifts during a long stop time due to
command input zero, inputting this signal stops the
motor by friction torque. (Function disabled for torque
control type)
Zero clamp ZCMD Inputting this signal makes the speed command 0
(zero). (Function disabled for torque control type)
Internally set velocity
select
VCS2 /
VCS1
Combining CN1 - 35 and 36 input signals enables a
desired internally set velocity to be selected. (Function
disabled for torque control type)
Input sequence power
supply 1
5 to 24
VDC
23 ― External power supply for CN1 - 30, 31, 32, 33, 36 and
37.
Internal velocity
command revolution
direction
ROTS 34 (50) Type 1 This signal specifies the revolution direction when the
internal velocity command is turned on.
*1 The pin numbers in parentheses denote the ground or common side of each signal.
*2 For the circuit type, see Fig. 9-20.
For 35 and
36 pins, one
of the four
functions
can be
selected by
setting the
remote
operator.
 Loading...
Loading...










