Design and description
04.00 | SVH | Assembly and Operating Manual | en | 389734 17
4 Design and description
The 5‐finger gripping hand SVH is a servo-electric gripping
module with integrated control and regulation electronics that is
largely a recreation of the human hand.
The product is designed to be attached to a standard LWA4P or
LWA4D lightweight arm.
The defined mechanical and electrical interface also makes it
possible to attach it to other commercially available industrial
and lightweight robots.
The product must always be operated within its technical
specifications, }3 [/15].
Two designs are available, corresponding to the right and left
human hands. The dimensions and operating data are identical
for both designs.
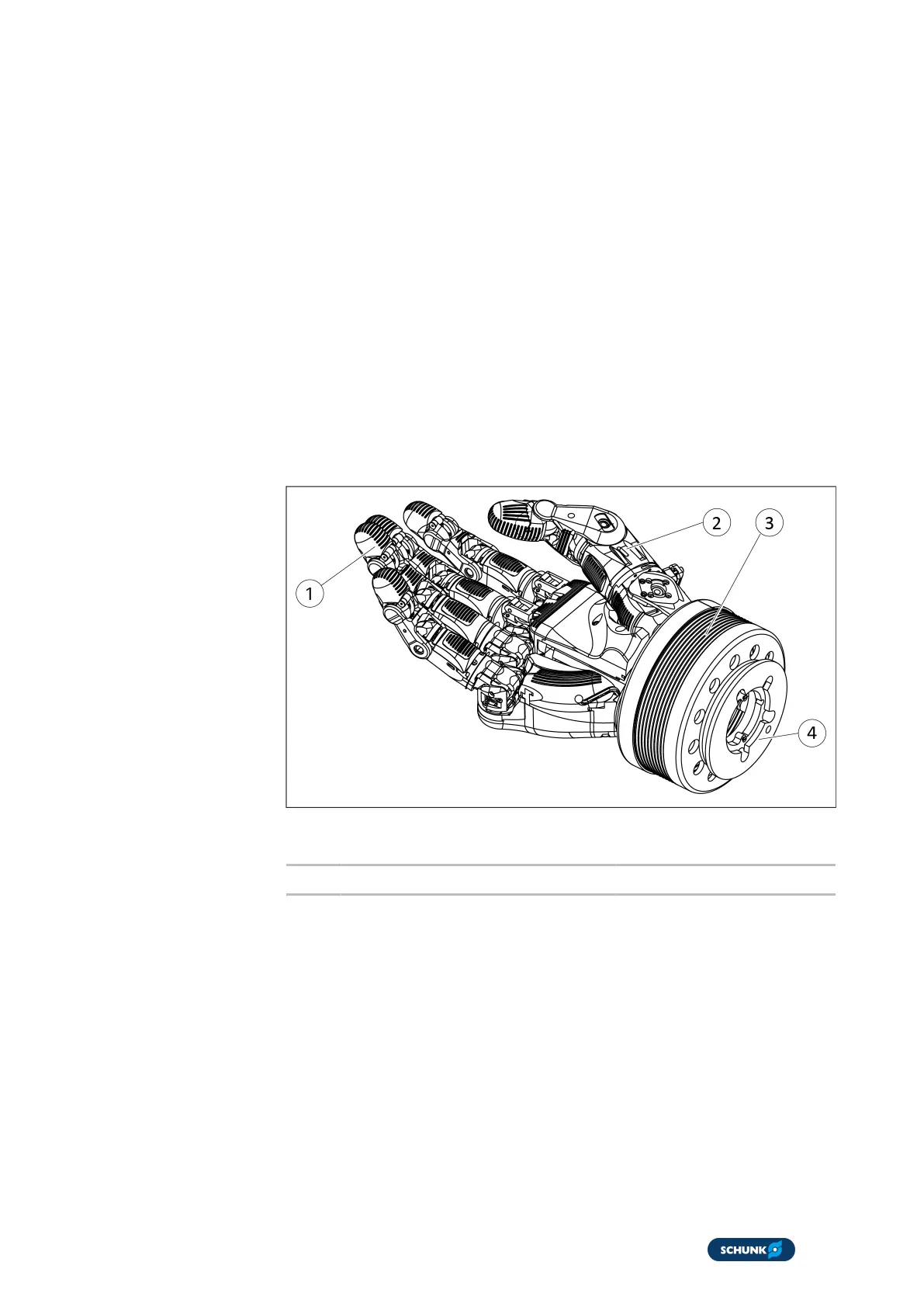
Overall view of the 5-finger gripping hand SVH
1 fingers 3 Wrist
2 Thumbs 4 Flat change system
The product is suitable for mobile applications due to its design
and low power consumption, including with an accumulator
power supply.
Possible movements include:
l
Bending and extending the fingers
l
Spreading out the hand
l
Pivoting and bending the thumb
A slip-resistant, elastic gripping surface on the fingers and
thumbs allow objects to be gripped securely.
A total of nine drive motors control the movements of the fingers
and thumb.