Operating Instructions Chapter 3
Ranger E/D
8011731 SICK IVP • Industrial Sensors • www.sickivp.com • All rights reserved 13
Overview
3 Overview
3.1 Measuring with the Ranger
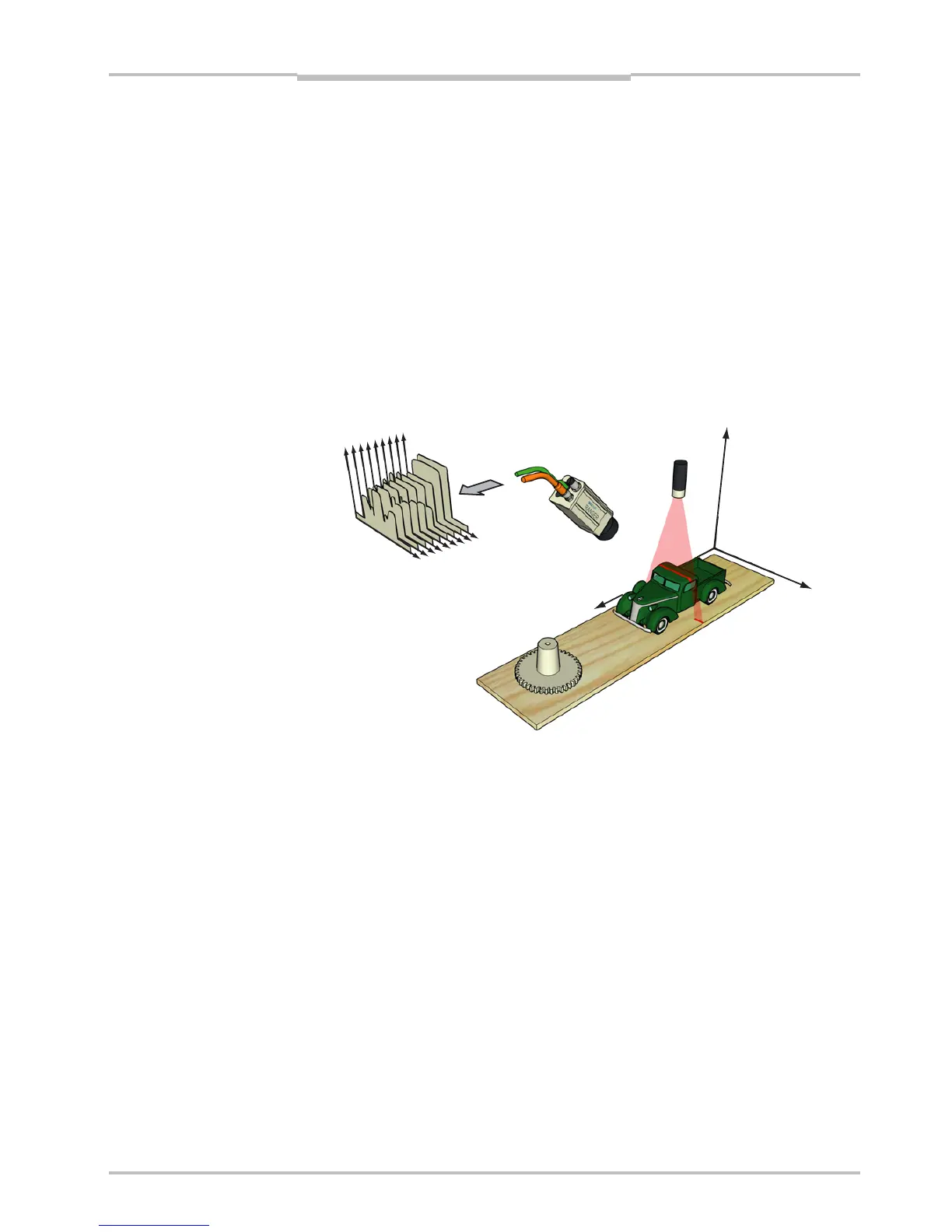
Each time the Ranger makes a measurement, it measures along a cross-section of the
object in front of it. The result of a measurement is a profile, containing one value for each
measured point along the cross-section – for example the height of the object along its
width.
For the Ranger to measure an entire object, the object (or the Ranger and illumination)
must be moved so that the Ranger can make a series of measurements along the object.
The result of such a measurement is a collection of profiles, where each profile contains
the measurement of a cross-section at a certain location along the transportation direc-
tion.
Figure 3.1 – Measuring the range of a cross-section of an object.
For some types of measurements, the Ranger will produce more than one profile when
measuring one cross-section. For example, certain types of range measurements will
result in one range profile and one intensity profile, where the intensity profile contains the
reflected intensity at each measured point.
In addition, the Ranger C and E models – being MultiScan cameras –can also make
parallel measurements on the object. This could for example be used for measuring
surface properties of the objects at the same time as the shape. If the Ranger is config-
ured for MulitScan measurements, the Ranger may produce a number of profiles each
time it makes one measurement – including multiple profiles from one cross-section of the
object, as well as profiles from parallel cross-sections.
In this manual, the term scan is sometimes used for the collection of measurements made
by the Ranger at one point in time.
Note that the range measurement values from the Ranger are not calibrated – that is:
Range values (z coordinates) are given as row – or pixel – locations on the sensor.
The location of a point along the cross-section (x coordinate) is given as a number
representing the column on the sensor in which the point was measured.
The location of a point along the transport direction (y coordinate) is represented by for
example the sequence number of the measurement, or the encoder value for when the
scan was made.
Profiles