In the case of machine kinematics that move the workpiece (rotary table), the axis direction is
reversed.
Note
Interrelation of TOOLCARRIER ⇔ 5-axis transformation (transformer type 24, 40, 56):
For 5-axis transformation, transformer type 72 in MD24100: $MC_TRAFO_TYPE_1 can be
used.
In the case of transformer type 72, the vectors of the TOOLCARRIER in MD24582:
$MC_TRAFO5_TCARR_NO_1 are used.
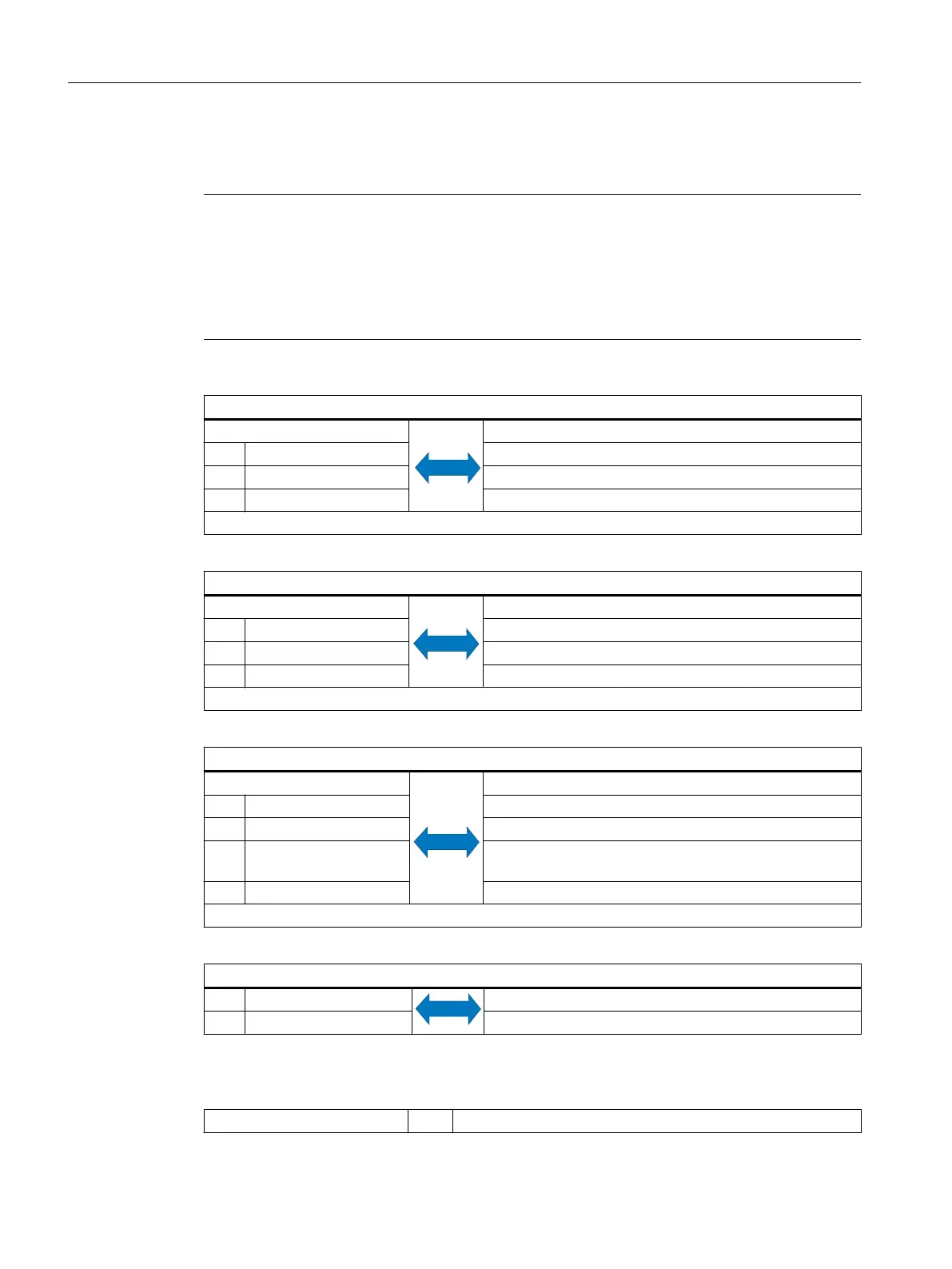
Swivel head (swivel-mounted tool)
$TC_CARR23[n]="T" MD24100: $MC_TRAFO_TYPE_1=24
I1 $TC_CARR1...3[n] MD24500: $MC_TRAFO5_PART_OFFSET_1 [0...2]
I2 $TC_CARR4...6[n] MD24560: $MC_TRAFO5_JOINT_OFFSET_1 [0...2]
I3 $TC_CARR15...17[n] MD24550: $MC_TRAFO5_BASE_TOOL_1 [0...2]
Closure of the I1=-(I2+I3) vector chain; for fixed-mounted machine kinematics
Swivel table (swivel-mounted workpiece)
$TC_CARR23[n]="P" MD24100: $MC_TRAFO_TYPE_1=40
I2 $TC_CARR4...6[n] MD24550: $MC_TRAFO5_BASE_TOOL_1 [0..2]
I3 $TC_CARR15...17[n] MD24558: $MC_TRAFO5_JOINT_OFFSET_1 [0...2]
I4 $TC_CARR18...20[n] MD24500: $MC_TRAFO5_PART_OFFSET_1 [0...2]
Closure of the I4=-(I2+I3) vector chain; for fixed-mounted machine kinematics
Swivel head + swivel table (swivel-mounted tool + workpiece)
$TC_CARR23[n]="M"
MD24100: $MC_TRAFO_TYPE_1=56
I1 $TC_CARR1...3[n] MD24560: $MC_TRAFO5_JOINT_OFFSET_1 [0...2]
I2 $TC_CARR4...6[n] MD24550: $MC_TRAFO5_BASE_TOOL_1 [0...2]
I3 $TC_CARR15...17[n] MD24558: $MC_TRAFO5_JOINT_OFF‐
SET_PART_1[0...2]
I4 $TC_CARR18...20[n] MD24500: $MC_TRAFO5_PART_OFFSET_1 [0...2]
Closure of the I1=-I2 I4=-I3 vector chain; for fixed-mounted machine kinematics
Rotary axis vectors V1, V2
V1 $TC_CARR7..9[n] MD24570: $MC_TRAFO5_AXIS1_1[0..2]
V2 $TC_CARR10..12[n] MD24572: $MC_TRAFO5_AXIS2_1[0..2]
Fine offsets of offset vectors
$TC_CARR41[n] to $TC_CARR60[n]
Technologies and cycles
21.7 Swiveling
SINUMERIK Operate (IM9)
572 Commissioning Manual, 12/2017, 6FC5397-1DP40-6BA1
 Loading...
Loading...















