Detailed Description
2.4 Closed-loop control
Velocities, Setpoint/Actual-Value Systems, Closed-Loop Control (G2)
2-50 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
The speed and current control systems for SIMODRIVE 611 are described in:
References:
/IAD/ "Installation & Startup Guide" SINUMERIK 840D/611D digital
/IAC/ "Installation & Startup Guide" SINUMERIK 810D
/PJU/ "Planning Guide" Converters
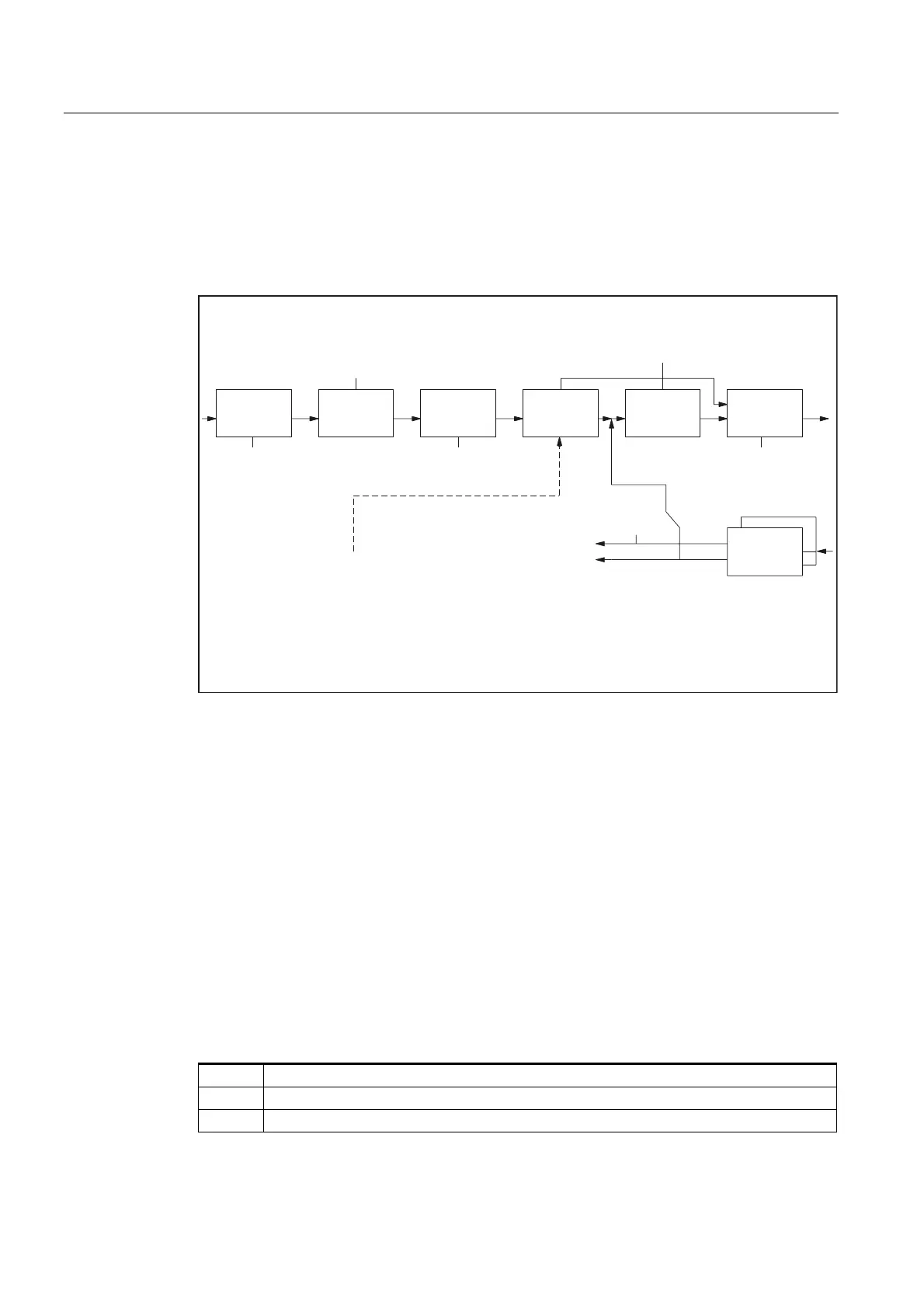
The basic structure of an axis/spindle position control is illustrated below:
0'$;B-(5.B(1$%/(
0'$;B-(5.B02'(
0'$;B-(5.B7,0(
0'326&75/B*$,1>Q@
0'),32B7<3(
0''<1B0$7&+B(1$%/(
0''<1B0$7&+B7,0(>Q@
0')5,&7B&203B(1$%/(
0'$;B027,21B',5
0'(1&B)(('%$&.B32/>Q@
0'(1&B&203B(1$%/(>Q@
0'%$&./$6+>Q@
0'%$&./$6+B)$&725>Q@
0')):B02'(
0')):B$&7,9$7,21B02'(
0'9(/2B)):B:(,*+7>Q@
0'$;B,1(57,$
0'(48,9B63(('&75/B7,0(>Q@
0'(48,9B&855&75/B7,0(>Q@
)LQH
LQWHUSRODWLRQ
-HUN
OLPLWDWLRQ
'\QDPLF
UHVSRQVH
DGDSWDWLRQ
)HHG
IRUZDUG
FRQWURO
&ORVHG
ORRSFRQWURO
6SHHG
VHWSRLQW
SURFHVVLQJ
$FWXDOYDOXH
SURFHVVLQJ
,)&
SRVLWLRQPHDVXULQJ
V\VWHP
3DUDPHWHUVHWV
Fig. 2-12 Additional servo parameter sets for position control
For a description of the feedforward control, backlash, friction compensation with further
machine data, and leadscrew error compensation, see:
References:
/FB2/Description of Functions, Extended Functions; Compensations (K3).
For a description of jerk limitation, see:
References:
/FB1/Description of Functions, Basic Machine; Acceleration (B2).
Fine Interpolation
The fine interpolator (FIPO) is used to adjust the setpoint of the (generally lower) interpolator
cycle clock to the later position-control cycle.
Fine interpolation further improves the quality of the contour (decreasing the step effect of
the speed setpoint).
There are three types of FIPOs:
1: Differential FIPO
2: Cubic FIPO
3: Cubic FIPO, optimized for operation with feedforward control
 Loading...
Loading...















