Special Motion Commands
5.5 Polynomial interpolation (POLY, POLYPATH)
Job planning
5-18 Programming Manual, 03/2006 Edition, 6FC5398-2BP10-1BA0
POLPATH ( )
Deactivates the polynomial interpolation for all axes
Example
N10 G1 X… Y… Z… F600
N11 POLY PO[X]=(1,2.5,0.7) ->
-> PO[Y]=(0.3,1,3.2) PL=1.5
;Polynomial interpolation ON
N12 PO[X]=(0,2.5,1.7) PO[Y]=(2.3,1.7) PL=3
…
N20 M8 H126 …
N25 X70 PO[Y]=(9.3,1,7.67) PL=5 ;Mixed settings for axes
N27 PO[X]=(10.2.5) PO[Y]=(2.3) ;No PL value programmed; PL=1 applies
N30 G1 X… Y… Z. ;Polynomial interpolation OFF
…
Example of applicable polynomial syntax with PO
Polynomial syntax used previously remains
valid
;New polynomial syntax (SW 6 and higher)
PO[axis identifier]=(.. , ..) ;Axis identifier=PO(.. , ..)
PO[PHI]=(.. , ..) ;PHI=PO(.. , ..)
PO[PSI]=(.. , ..) ;PSI=PO(.. , ..)
PO[THT]=(.. , ..) ;THT=PO(.. , ..)
PO[]=(.. , ..) ;PO(.. , ..)
PO[variable]=IC(.. , ..) ;variable=PO IC(.. , ..)
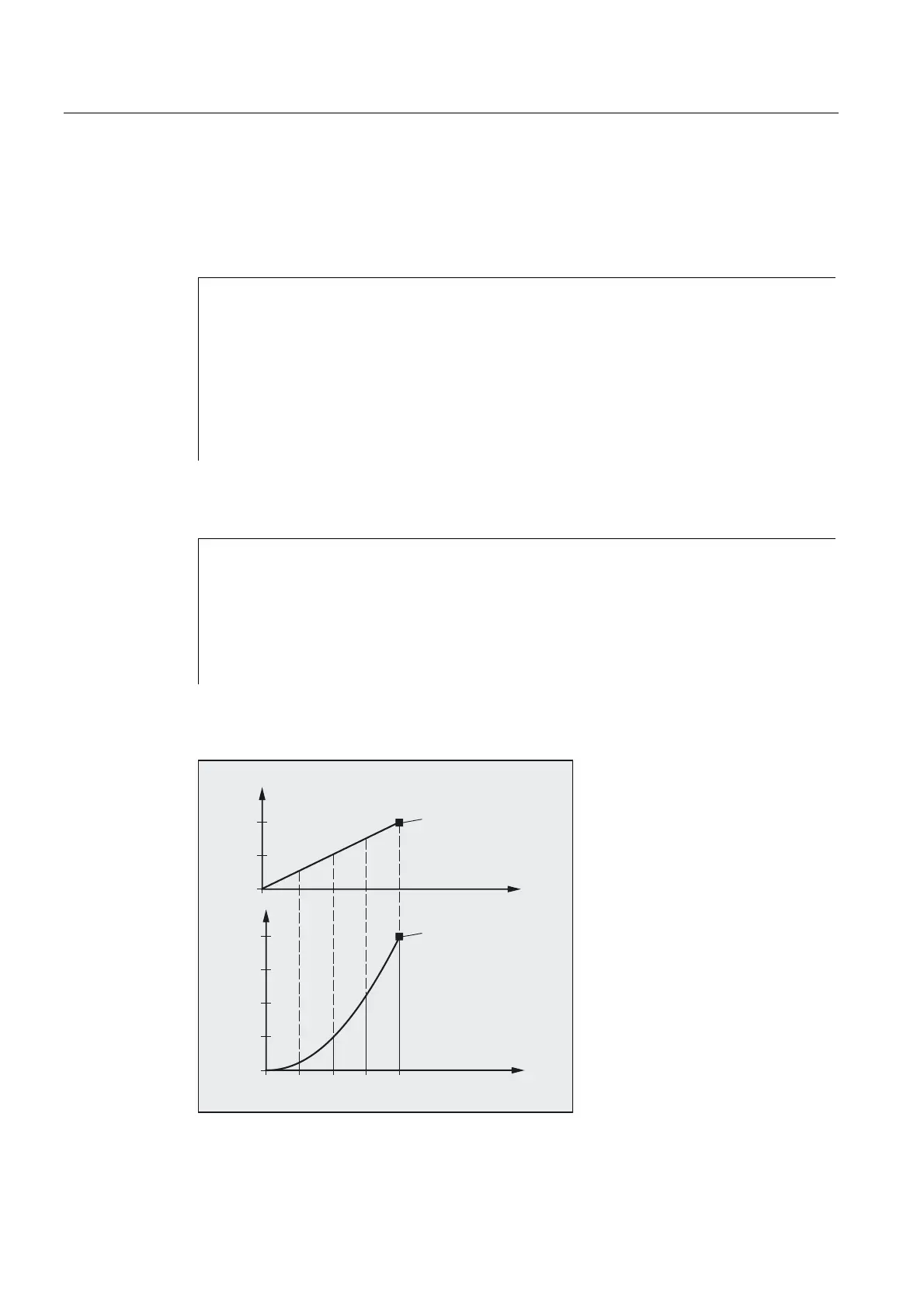
Example of a curve in the X/Y plane
([DPSOH
(QGSRLQW
(QGSRLQW
3/
32>;@
132/<32><@
1;<*
3/
;
S
<
S

 Loading...
Loading...



















