Special Motion Commands
5.5 Polynomial interpolation (POLY, POLYPATH)
Job planning
Programming Manual, 03/2006 Edition, 6FC5398-2BP10-1BA0
5-19
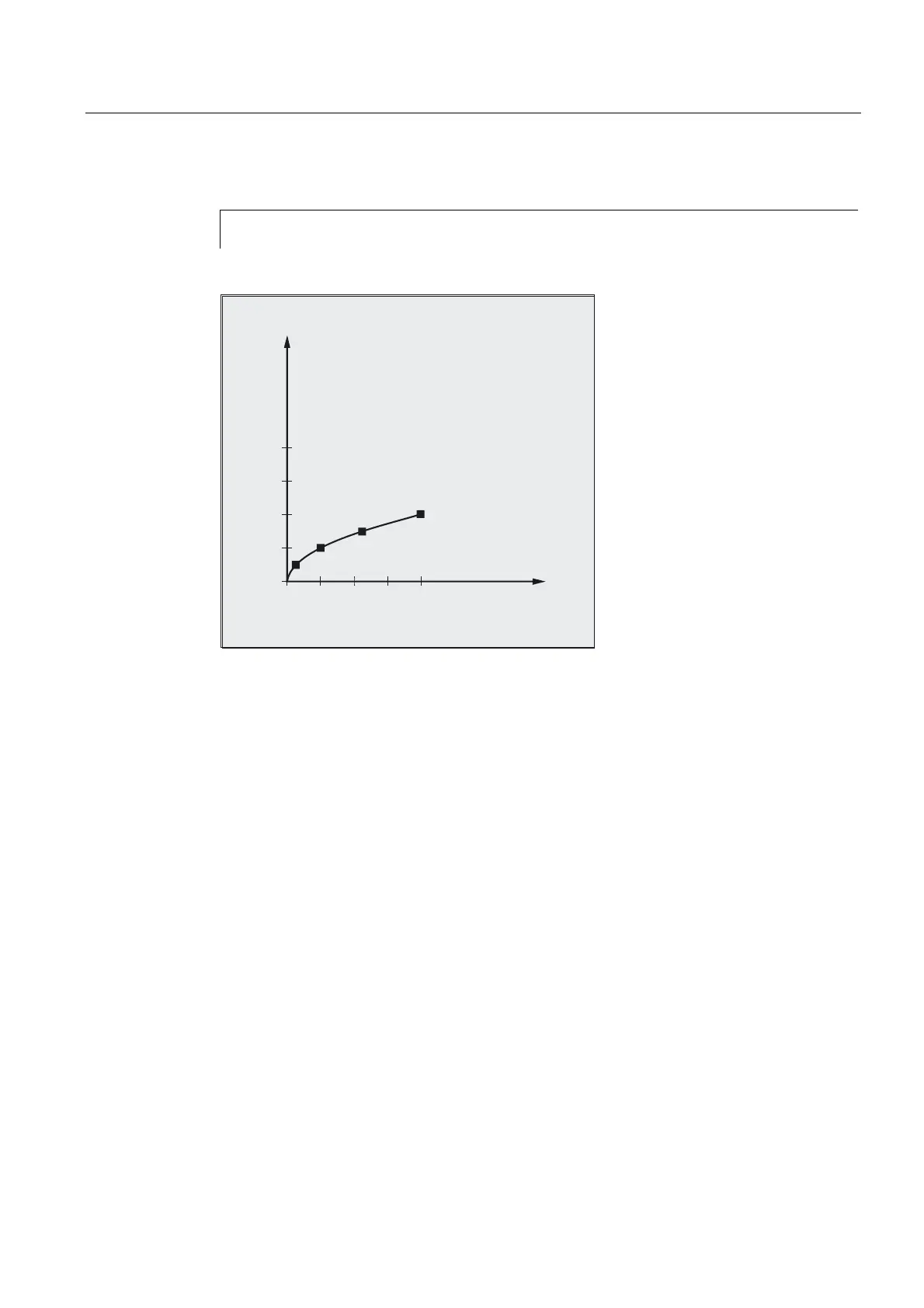
N9 X0 Y0 G90 F100
N10 POLY PO[Y]=(2) PO[X]=(4,0.25) PL=4
3/
<
;
5HVXOWLQ;<SODQH
Description
The control system is capable of traveling curves (paths) in which each selected path axis
follows a function (polynomial, max. 3rd degree) or (polynomial, max. 5th degree)
The equation used to express the polynomial function is generally as follows:
f(p)= a
0
+ a
1
p + a
2
p
2
+ a
3
p
3
or
f(p)= a
0
+ a
1
p + a
2
p
2
+ a
3
p
3
+ a
4
p
4
+ a
5
p
5
Key:
a
n
: Constant coefficients
p: Parameters

 Loading...
Loading...



















