Frames
6.1 Coordinate transformation via frame variables
Job planning
6-6 Programming Manual, 03/2006 Edition, 6FC5398-2BP10-1BA0
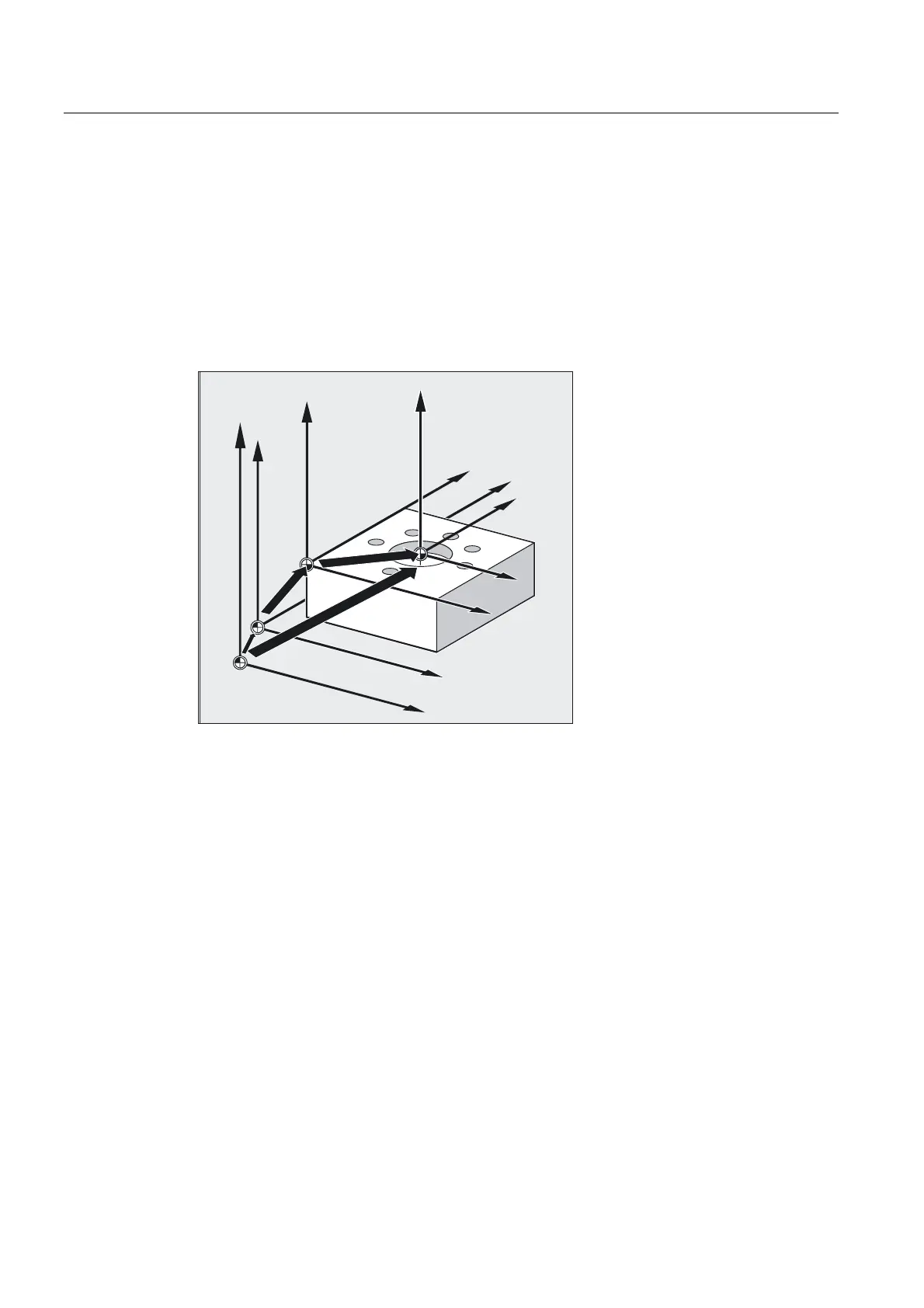
$P_ACTFRAME
Current, resulting complete frame that results from chaining
• the current basic frame variable $P_BFRAME,
• the currently settable frame variable $P_IFRAME with system frames and
• the currently programmable frame variable $P_IFRAME with system frames.
System frames, see Section "Frames that Act in the Channel"
$P_ACTFRAME describes the currently valid workpiece zero.
=
%16
<
;
%16
=
=
<
;
<
;
(16
(16
:.6
:.6
(16
%16
:.6
;
%.6
=
%.6

 Loading...
Loading...



















