Motion synchronous actions
10.4 Actions in synchronized actions
Job planning
10-24 Programming Manual, 03/2006 Edition, 6FC5398-2BP10-1BA0
The following applications are possible:
• Calculations of complex expressions in the IPO cycle
• Axis movements and spindle controls
• Change and evaluate online setting data from synchronized actions, such as positions,
and output times of software cams to PLC or NC peripherals
• Output of auxiliary functions to PLC
• Setting up safety functions
• Set superimposed movement, online tool offset and clearance control
• Execute actions in all operating modes
• Influence synchronized actions from PLC
• Run technology cycles
• Output of digital and analog signals
• Record performance recording of the synchronized actions at the interpolation cycle and
the computation time of the position controller for the loading report
• Diagnostic capabilities in the user interface
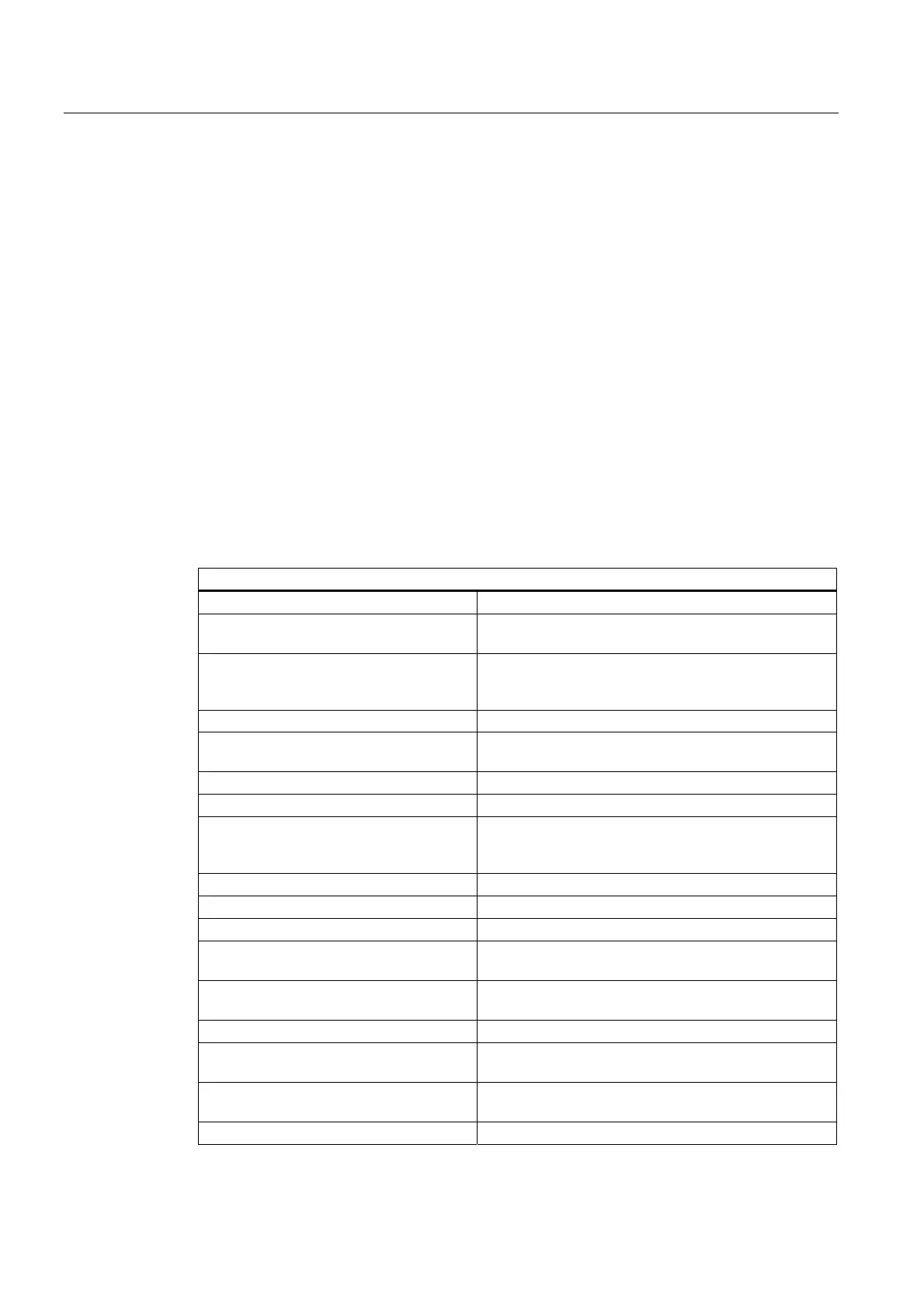
Applications for motion-synchronous actions
Synchronized action Description
DO $V…=
DO $A...=
assign (servo values)
assign variable (main run variable)
DO $AC…[n]=
DO $AC_MARKER[n]=
DO $AC_PARAM[n]=
Special main run variable
Read or write synchronized action marker
Read or write synchronized action parameter
DO $R[n]= Read or write arithmetic variable
DO $MD...=
DO $$SD...=
Read MD value at interpolation time
Write SD value in main run
DO $AC_TIMER[n]=Start value Timers
DO $AC_FIFO1[n] …FIFO10[n]= FIFO variables
DO $AC_BLOCKTYPE=
DO $AC_BLOCKTYPEINFO=
DO $AC_SPLITBLOCK=
Interpret the current block (main run variable)
DO M-, S and H e.g. M07 Output of M, S and H auxiliary functions
DO RDISABLE Set read-in disable
DO STOPREOF Cancel preprocessing stop
DO DELDTG Fast deletion of distance-to-go without preprocessing
stop
FTCDEF(polynomial, LL, UL , coefficient)
DO SYNFCT(polynomial, output, input)
Definition of polynomials
Activation of synchronized functions: adaptive control
DO FTOC Online tool offset
DO G70/G71/G700/G710 Specify measuring system for positioning tasks
Dimensions in inches or metric
DO POS[Axis]= / DO MOV[Axis]=
DO SPOS[Spindle]=
Start/position/stop command axes
Start/position/stop command spindles
DO MOV[Axis]=value Start/position infinite movements of a command axis

 Loading...
Loading...



















