Motion synchronous actions
10.4 Actions in synchronized actions
Job planning
Programming Manual, 03/2006 Edition, 6FC5398-2BP10-1BA0
10-35
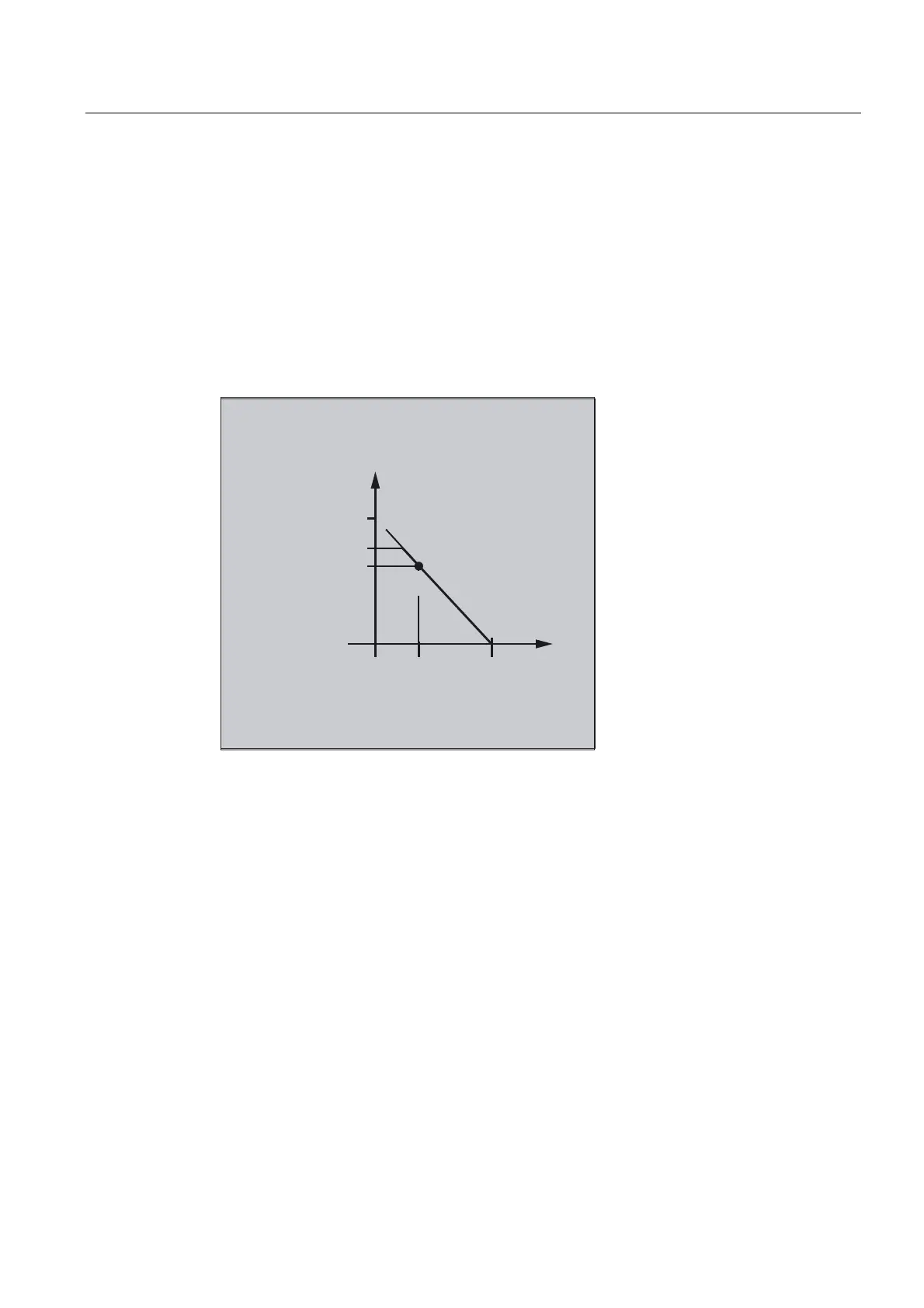
Example of adaptive control (multiplicative)
Influence the programmed feedrate by multiplication
The aim is to influence the programmed feedrate by multiplication. The feedrate must not
exceed certain limits – depending on the load on the drive:
• The feedrate is to be stopped at a drive load of 80%: override = 0
• At a drive load of 30% it is possible to traverse at programmed feedrate:
override = 100%.
The feedrate can be exceeded by 20%:
Max. override = 120%.
>@
295
>@
YROWDJHOLPLW
8SSHUOLPLW
/RDG
1. Polynomial definition
Determination of the coefficients
y = f(x) = a
0
+ a
1
x + a
2
x
2
+ a
3
x
3
a
1
= -100%/(80-30)% = -2
a
0
= 100 + (2*30) = 160
a
2
= a
3
= 0 (no square and cubic component)
Upper limit = 120
Lower limit = 0
This means:
FCTDEF(2,0,120,160,-2,0,0)
2. Activate AC control
ID=1 DO SYNFCT(2,$AC_OVR,$AA_LOAD[x])
;Read the current axis load (% of the max. drive current) via $AA_LOAD[x],
;calculate the feedrate override with the polynomial defined above.

 Loading...
Loading...



















