12.95
4.3 Measuring system
4-76
E Siemens AG, 2002. All rights reserved
SINUMERIK 810D Manual Hardware Configuration (PHC) -- 11.02 Edition
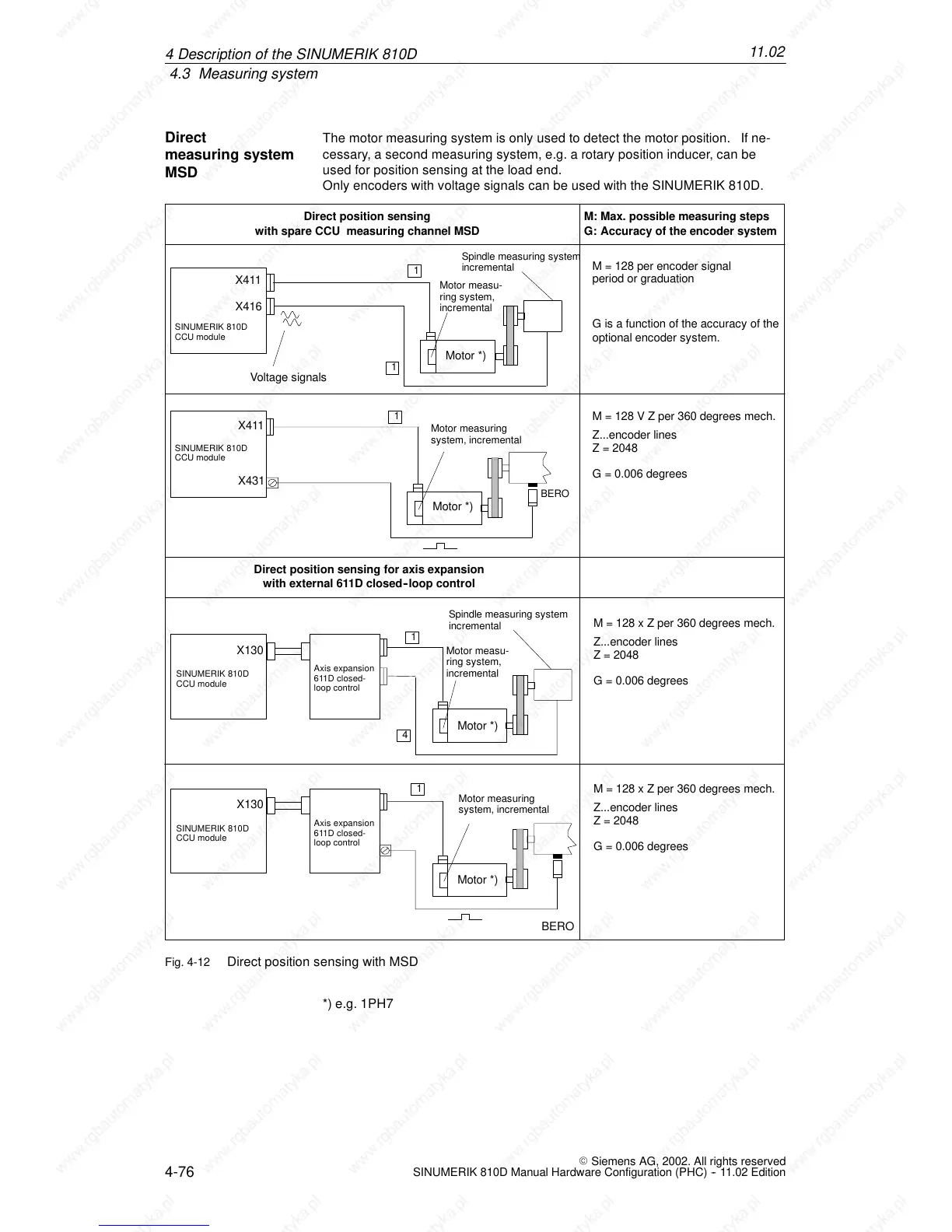
The motor measuring system is only used to detect the motor position. If ne-
cessary, a second measuring system, e.g. a rotary position inducer, can be
used for position s ensing at the load end.
Only encoders with voltage signals can be used with the SINUMERIK 810D.
Motor *)
Motor measuring
system, incremental
BERO
SINUMERIK 810D
CCU module
X411
SINUMERIK 810D
CCU module
Axis expansion
611D clos ed-
loop control
X130
Motor *)
BERO
M = 128 x Z per 360 degrees mech.
Z...encoder lines
Z = 2048
G = 0.006 degrees
M = 128 V Z per 360 degrees mech.
Z...encoder lines
Z = 2048
G = 0.006 degrees
M: Max. possible measuring steps
G: Accuracy of the encoder system
Direct position sensing
with spare CCU measuring channel MSD
Spindle measuring system
incremental
Voltage signals
X411
X416
M = 128 per encoder signal
period or graduation
G is a function of the accuracy of the
optional encoder system.
SINUMERIK 810D
CCU module
Motor *)
SINUMERIK 810D
CCU module
Axis expansion
611D clos ed-
loop control
X130
Motor *)
M = 128 x Z per 360 degrees mech.
Z...encoder lines
Z = 2048
G = 0.006 degrees
Spindle measuring system
incremental
Motor measu-
ring system,
incremental
Motor measu-
ring system,
incremental
Motor measuring
system, incremental
X431
Direct position sensing for axis expansion
with external 611D closed--loop control
1
1
1
1
4
1
Fig. 4-12 Direct position sensing with MSD
*) e.g. 1PH7
Direct
measuring system
MSD
4De

 Loading...
Loading...



















