Square turn
Makes the vessel automatically turn 90° after having travelled a
defined leg distance.
During the turn you can alter the main heading by turning the
rotaty knob (only for AC12N/AC42N autopilot computers).
• Turn variable:
-
Leg distance
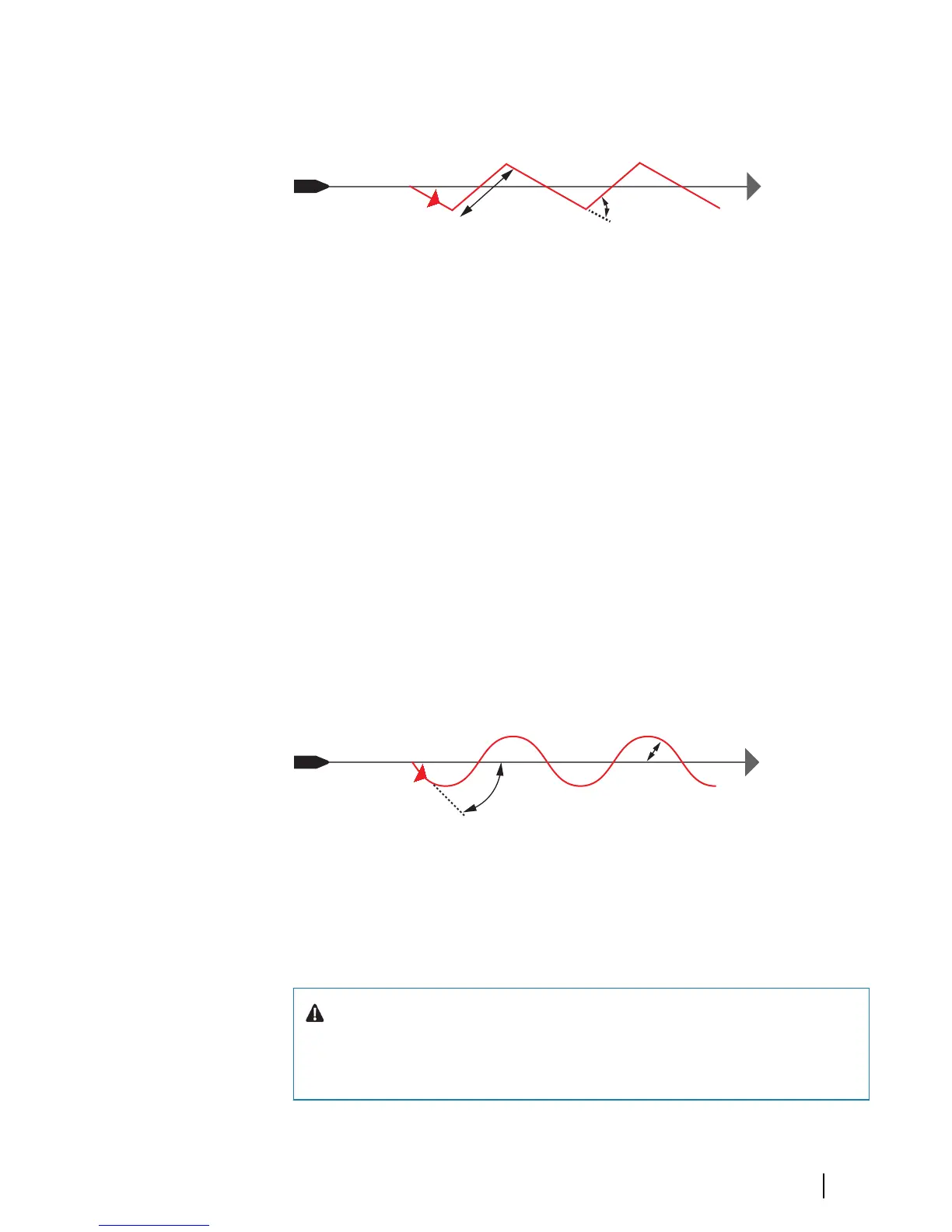
Lazy-S turn
Makes the vessel yaw around the main heading.
You set the selected heading change before the turn is started.
During the turn you can alter the main heading by turning the
rotaty knob (only for AC12N/AC42N autopilot computers).
• Turn variables:
- Course change (C)
- Turn radius (D)
Depth contour tracking (DCT)
Makes the autopilot follow a depth contour.
Ú
Note: DCT turn pattern is only available if the system has a valid
depth input.
Warning: Do not use the DCT turn pattern unless the
seabed is suitable. Do not use it in rocky waters where
the depth is varying significantly over a small area.
Autopilot modes | AP44 Operator Manual
21