| 31
The operational modes | AP70/AP80 Operator Manual
Turning in TRACK mode
The AP80 receives turn information from the ECDIS system. When the vessel reaches the
arrival circle for a waypoint, the ECDIS system will give a wheel-over alarm. The autopilot will
turn the vessel according to route information independant on if the alarm is confirmed on
the ECDIS system.
Controlling steering performance in automatic and naviga-
tional modes
The Quick menus
Some parameters might be adjusted during operation to suit you personal preferences in
auto and navigation modes.
The parameters are available in the quick menus, accessed by pressing the MENU key.
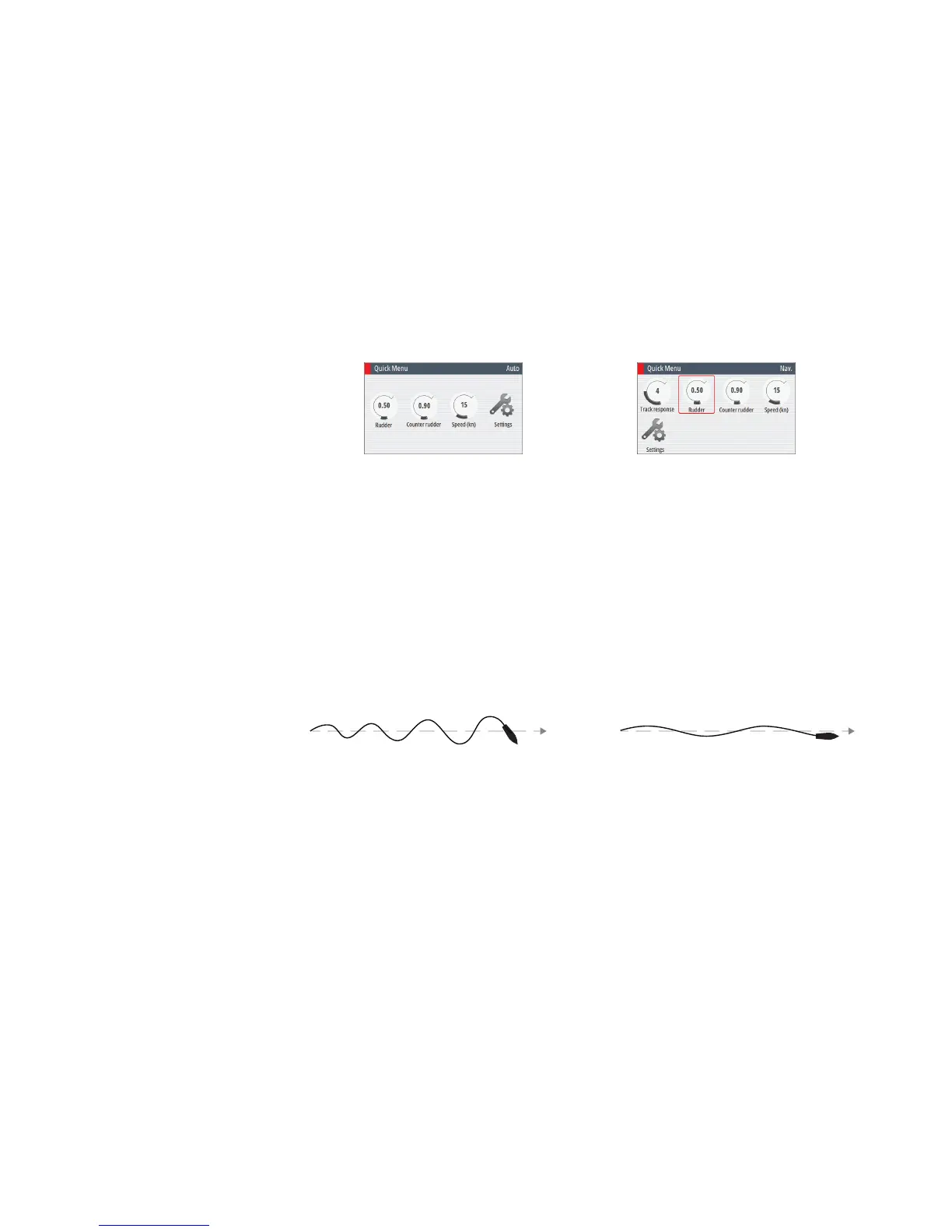
Quick menu - AUTO mode Quick menu - NAV mode
Track response (NoDrift and NAV mode)
Defines how fast the autopilot shall respond after having registered a cross track distance.
Rudder
This parameter determines the ratio between commanded rudder and the heading error. The
higher rudder value the more rudder is applied.
A. The the value is set too high. Steering becomes unstable and often the overshoot will
increase
B. Rudder is too small. It will take a long time to compensate for a heading error, and the
autopilot will fail to keep a steady course
A B
Counter rudder
Counter rudder is the amount of counteracting (opposite) rudder applied to stop the turn at
the end of a major course change.
The settings depends on vessel’s characteristics, loaded/ballast conditions and rate of turn.
• If the vessel has good dynamic stability, relatively small settings will be sufficient
• An unstable vessel will require high settings
• The greater the vessel’s inertia, the greater value will be required
Increasing counter rudder settings may result in some higher rudder activity also when
steering a straight course.