20 |
The operational modes | AP70/AP80 Operator Manual
The operational modes
Mode overview
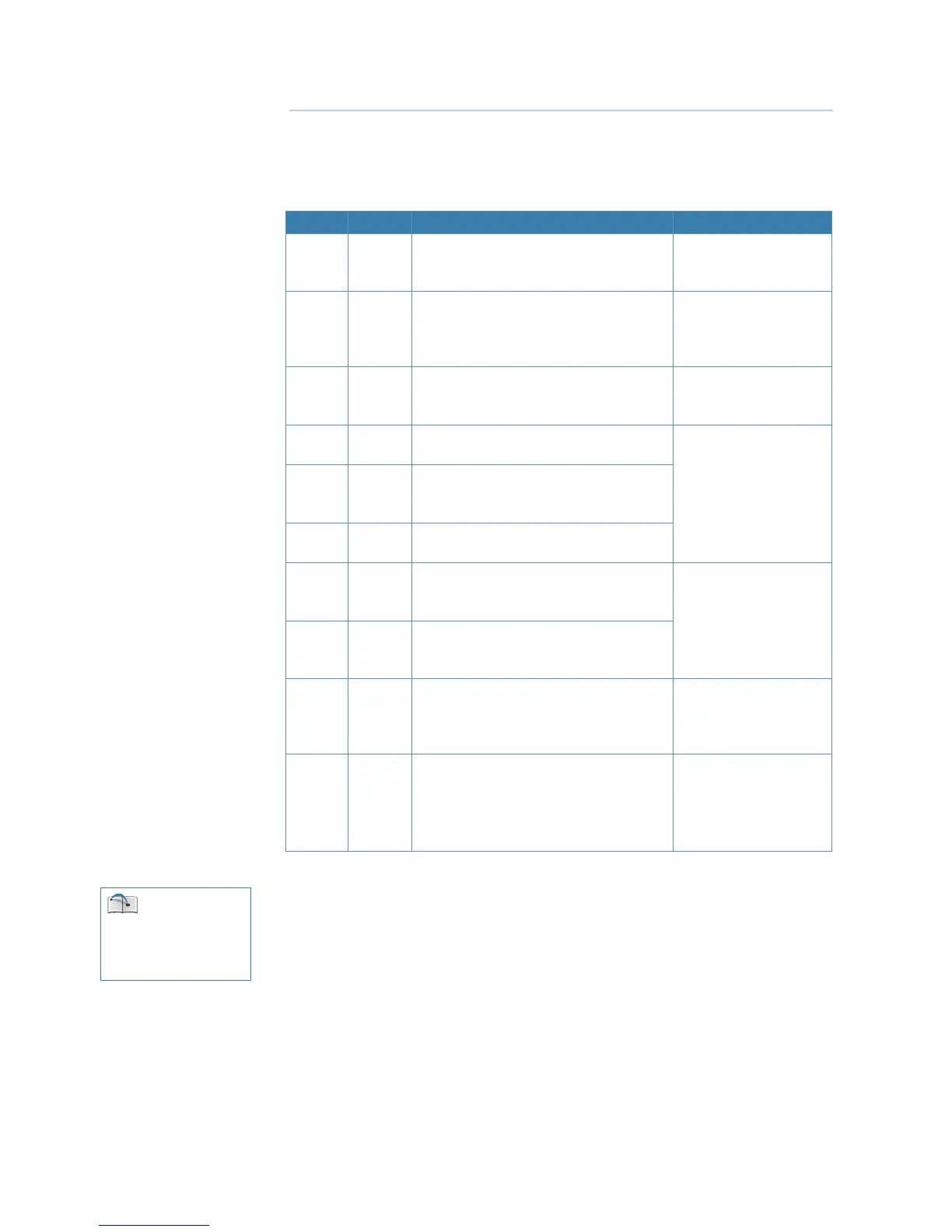
The autopilot has several steering modes. Number of modes and features within the mode
depend on available input as shown below.
MODE FEATURE DESCRIPTION REQUIRED INPUT
STBY
Standby mode used when manually
steering at the helm. Compass and rudder
angle will be shown on the display
NFU
Non-Follow-Up steering where the rudder
movement is controlled by using the red
(port) or green (starboard) keys, or by
another NFU unit
Rudder feedback
FU
Follow-up steering where the rudder
angle is set by the rotary knob or by
another FU unit
Rudder feedback
AUTO
Auto compass mode. Keeps the vessel on
set heading
Heading
Heading
capture
Aborts the turn and uses the
instantaneous compass reading as set
heading
Turn
(Pattern)
Moves the vessel automatically in pre-
defined turn steering patterns
NoDrift
Automatic steering, keeping the vessel on
a straight bearing line by compensating
for drift
Heading, speed, position
Heading
capture
Aborts the turn and uses the
instantaneous compass reading as set
heading
NAV
Navigation steering. The vessel is steered
to a specific waypoint location, or through
a route set on a chart plotter
Heading, speed, Cross
Track Distance (XTD)
and Bearing waypoint to
waypoint (BWW)
TRACK
Track steering. Approved for AP80 only
and requires an unlock key/code.
The routes are planned on and
commanded by an ECDIS (Electronic Chart
Display Information System)
Heading (True), Speed
and Track control data
via proprietary TNT
sentence.
External system selector
An external switch can be used for controlling change over from manual to automatic
steering.
The mode descriptions in the following pages assumes that an external system selector has
opened for autopilot operation, or that no external selector is installed.
4
See “Using an external
system selector to control
autopilot operation” on page
11 for further information