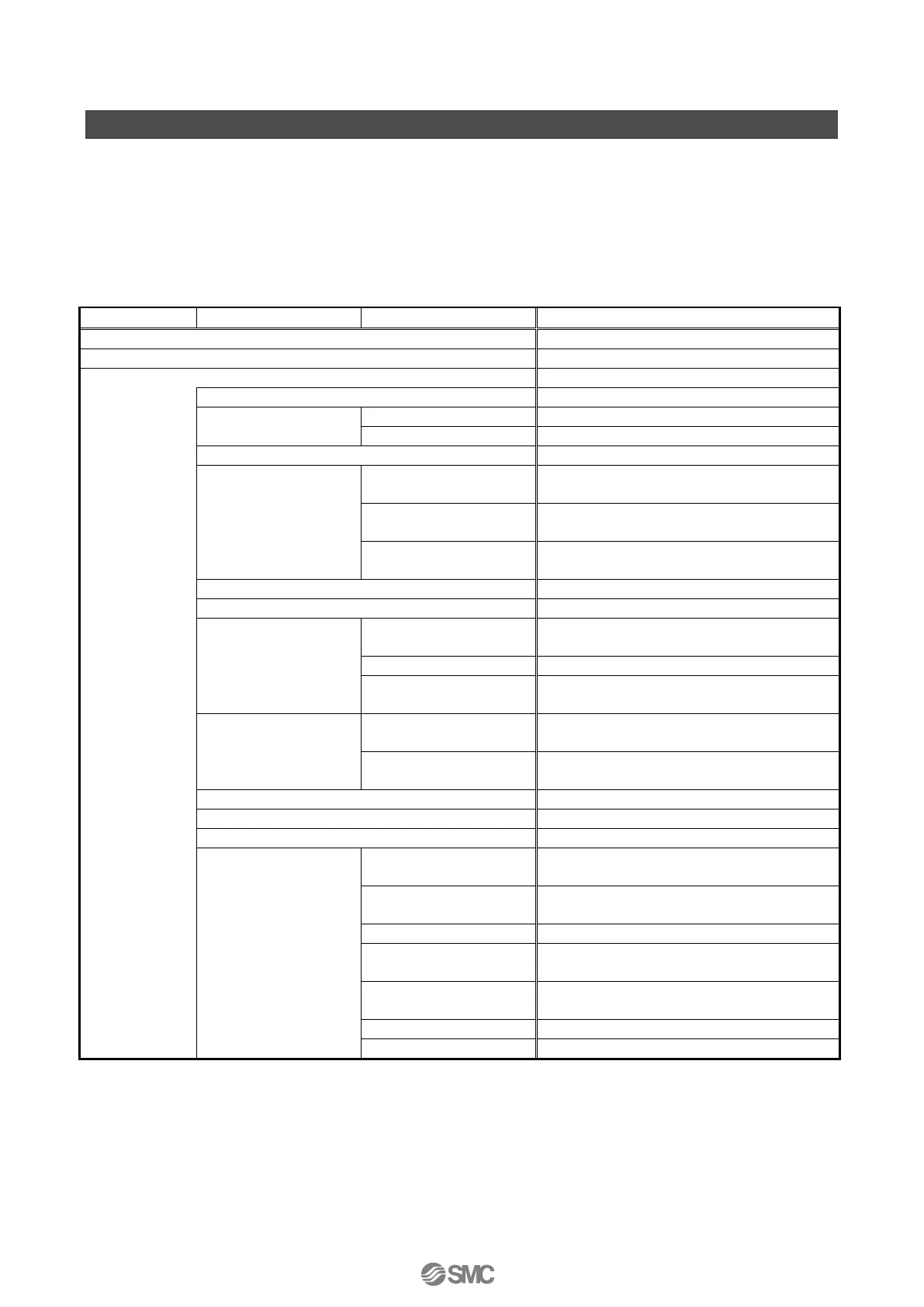
Parameter Settings List
The IP8001 smart positioner operates at settings suitable for various applications by changing
the setting parameters
*1
. Table 3 shows the main positioner functions which can be changed. For
details of the setting parameters, refer to “■Parameter Code Detail”.
Control the actuator with input current
Control actuator with button operation
(200)Operation direction setting
Set operation direction in direct
Set operation direction in reverse
(400)Zero point/ span setting
Adjust zero/span by specifying the actuator stroke at 0%
and100% of actuator stroke with figures
Zero/span is adjusted by actuator full stroke(including over
travel), used stroke, and selection of over travel setting side
Adjust zero/span by operating the actuator to set the
actuator stroke at 0% and 100% of input current
(500)Forced fully-close/ fully-open setting
Set forced fully-close / fully-open
Set deviation to which dead band is applied
(700)Valve opening
characteristics setting
(710~740)Selection setting
Select valve open characteristic which is registered
beforehand
Specify actuator stroke of each input current with figures
(760)User operation setting
Start actuator operation and specify actuator stroke of each
input current
(800)PID constant setting
(810/820)PID constant of
detail setting
Set PID constant in normal and reversed direction
(830)Easy adjustment of
PID constant
(810/820)Increase/decrease PID based on data which is
input in detail setting of PID constant
Alarm 1 set position value output
Alarm 2 set position value output
(b00)Analog output setting
Select proportional output/ reversed output of analog output
(C10)Check angle of
feedback lever
Check mount degree of feedback lever
(C20)Simple balance current
adjustment
Adjust torque motor balance current
Automatically adjust zero/span and PID constant
(C40/C50)Input current
adjustment
Adjust input current of 4mADC and 20mADC
(C60)Balance current
confirmation
Confirm torque motor balance current adjusting condition
by level indication
Adjust zero/span while set PID constant is maintained
All parameters returns to ex-factory status
1: Change of dead band (parameter code: 600) or valve characteristics (parameter code: 700) may prevent
the positioner from satisfying the “■Specifications”.
2: After execution, status becomes “not calibration”. Use the positioner after performing “■Initial Adjustment”.
 Loading...
Loading...