FY operation manual 48
Parameter
Hardware drive selection
0 : single output control
1 : dual output control
2 : valve control with feedback
3 : valve control without feedback
selection
4 : single phase control
Sub input type selection
0 : none
1 : 10~50mV / 4~20mA / 1~5V /
2~10V
(only available in remote SV)
2 : 0~50mV / 0~20mA / 0~5V /
0~10V
(only available in remote SV)
3 : valve feedback
4 : CT input
Automatic valve position adjustment
0 : OFF stop automatic adjust
1 : ON start automatic adjust
2 : E_PB Valve position determined
by external button
Motor valve traveling time
Time unit
:
second
Motor valve action interval time.
Time unit : second
Motor valve action main adjustment
unit : percentage
Motor valve action sub adjustment
unit : percentage
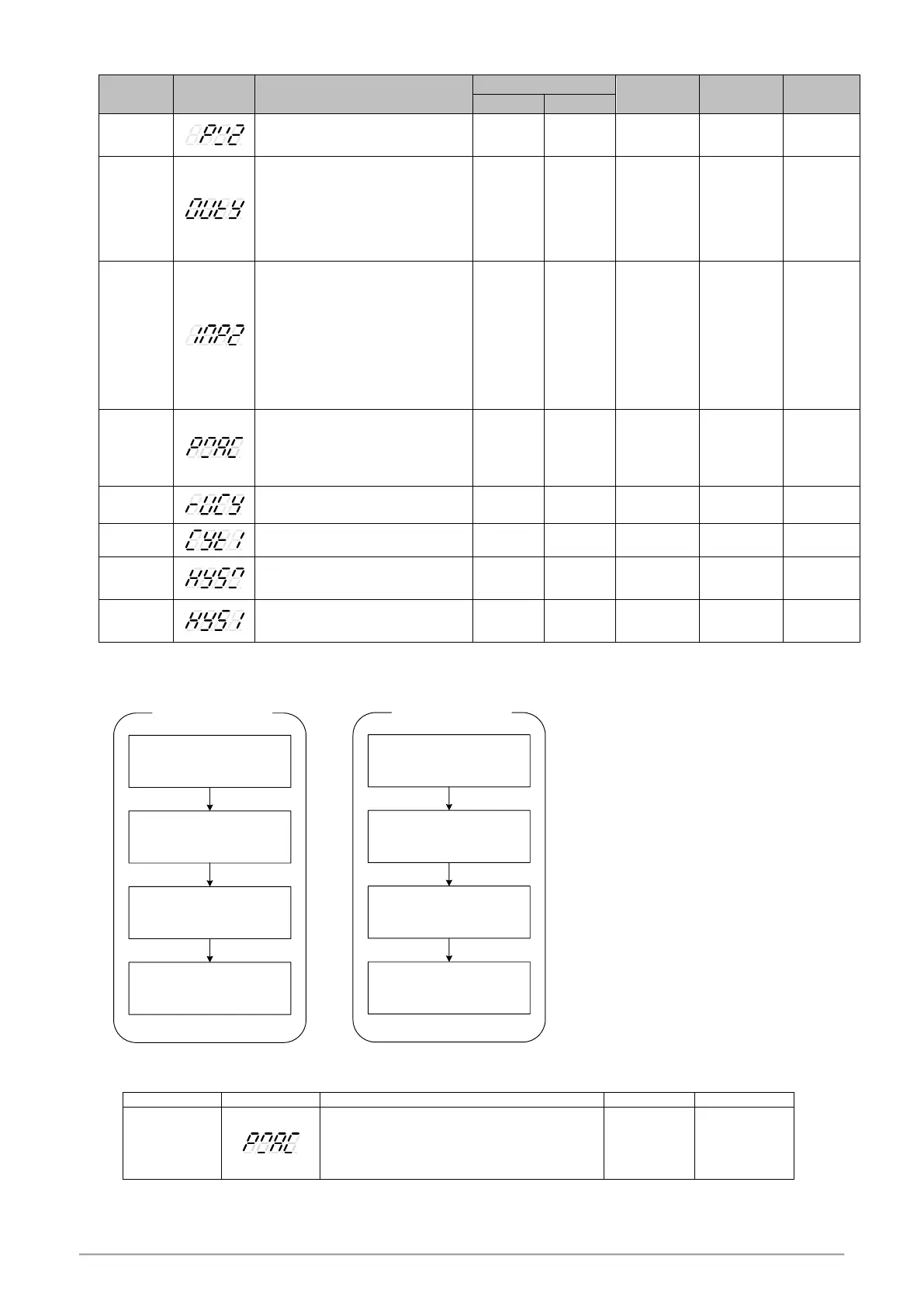
Motor valve Initial Setting
Set Motor valve traveling
time
( RUCY )
Set motor valve action
interval time
( CYT1 )
Set motor valve action
main hysteresis
( HYSM )
Set motor valve action
sub hysteresis
( HYS1 )
Without feedback
resistance
Executing automatic valve
position adjustment
( PMAC = ON )
Set motor valve action
interval time
( CYT1 )
Set motor valve action
main hysteresis
( HYSM )
Set motor valve action
sub hysteresis
( HYS1 )
With feedback
resistance
1. Executing automatic valve position adjustment
Automatic valve position adjustment
0 : OFF stop automatic adjust
1 : ON start automatic adjust
2 : E_PB Valve position determined
by external button
The motor valve low position(ANL2) and high position(ANH2) are calibrated and the travel time from completely open
to completely closed is set automatically
When the measurement has been complete the setting of the parameter will change to OFF.”PMER” will be display if any
of following errors occurs during execution.If an error occur check the wiring and other factors and execute automatic valve
 Loading...
Loading...



