50
參數
代號
名稱與機能 預設值 單位
設定
範圍
控制
模式
通訊位址
RS232 RS485
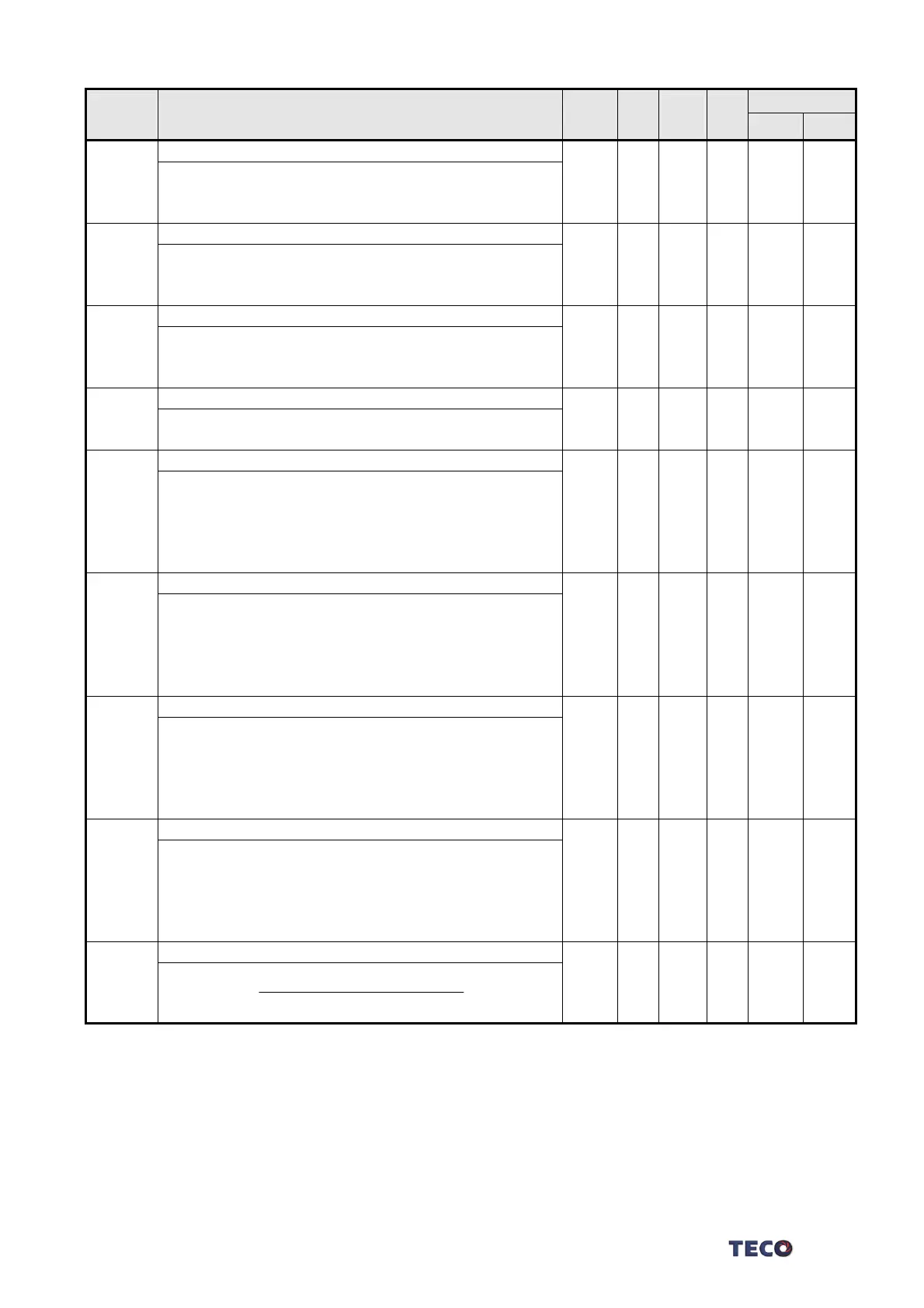
Cn017
PI/P 模式的切換條件(速度命令)
0 rpm
0
│
4500
Pi
Pe
S
C4CH 0011H
先設定 Cn015.0=1,當速度命令小於 Cn017 切換條件時,
為 PI 控制;當速度命令大於 Cn017 切換條件時,則切換成
只有 P 控制。
Cn018
PI/P 模式的切換條件(加速度命令)
0 rps/s
0
│
18750
Pi
Pe
S
C4DH 0012H
先設定 Cn015.0=2,當加速度命令小於 Cn018 切換條件
時,為 PI 控制;當加速度命令大於 Cn018 切換條件時,則
切換成只有 P 控制。
Cn019
PI/P 模式的切換條件(位置誤差量)
0 pulse
0
│
50000
Pi
Pe
S
C4EH 0013H
先設定 Cn015.0=3,當位置誤差量小於 Cn019 切換條件
時,為 PI 控制;當位置誤差量大於 Cn019 切換條件時,則
切換成只有 P 控制。
Cn020
兩段增益模式的切換延遲時間
0
x02
msec
0
│
10000
Pi
Pe
S
53CH 0014H
使用兩段增益模式時,可設定從第二段增益切換到第一段增
益的延遲時間。
Cn021
兩段增益模式的切換條件(轉矩命令)
200 %
0
│
399
Pi
Pe
S
53DH 0015H
先設定 Cn015.1=0,當轉矩命令小於 Cn021 切換條件時,
使用第一段增益控制;當轉矩命令大於 Cn021 切換條件時,
則切換成到第二段增益控制,若轉矩命令再次小於 Cn021
切換條件時,會依據 Cn020 切換延遲時間切換到第一段增
益控制。
Cn022
兩段增益模式的切換條件(速度命令)
0 rpm
0
│
4500
Pi
Pe
S
53EH 0016H
先設定 Cn015.1=1,當速度命令小於 Cn022 切換條件時,
使用第一段增益控制;當速度命令大於 Cn022 切換條件時,
則切換成到第二段增益控制,若速度命令再次小於 Cn022
切換條件時,會依據 Cn020 切換延遲時間切換到第一段增
益控制。
Cn023
兩段增益模式的切換條件(加速度命令)
0 rps/s
0
│
18750
Pi
Pe
S
53FH 0017H
先設定 Cn015.1=2,當加速度命令小於 Cn023 切換條件
時,使用第一段增益控制;當加速度命令大於 Cn023 切換
條件時,則切換成到第二段增益控制,若加速度命令再次小
於 Cn023 切換條件時,會依據 Cn020 切換延遲時間切換到
第一段增益控制。
Cn024
兩段增益模式的切換條件(位置誤差量)
0 pulse
0
│
50000
Pi
Pe
S
540H 0018H
先設定 Cn015.1=3,當位置誤差量小於 Cn024 切換條件
時,使用第一段增益控制;當位置誤差量大於 Cn024 切換
條件時,則切換成到第二段增益控制,若位置誤差量再次小
於 Cn024 切換條件時,會依據 Cn020 切換延遲時間切換到
第一段增益控制。
Cn025
負載慣量比
10 x0.1
0
│
1000
Pi
Pe
S
5FBH 0019H
%100×
)
M
(J
)
L
(J
=
伺服馬達轉子慣量
量轉換到馬達軸的負載慣
負載慣量比

 Loading...
Loading...
