67
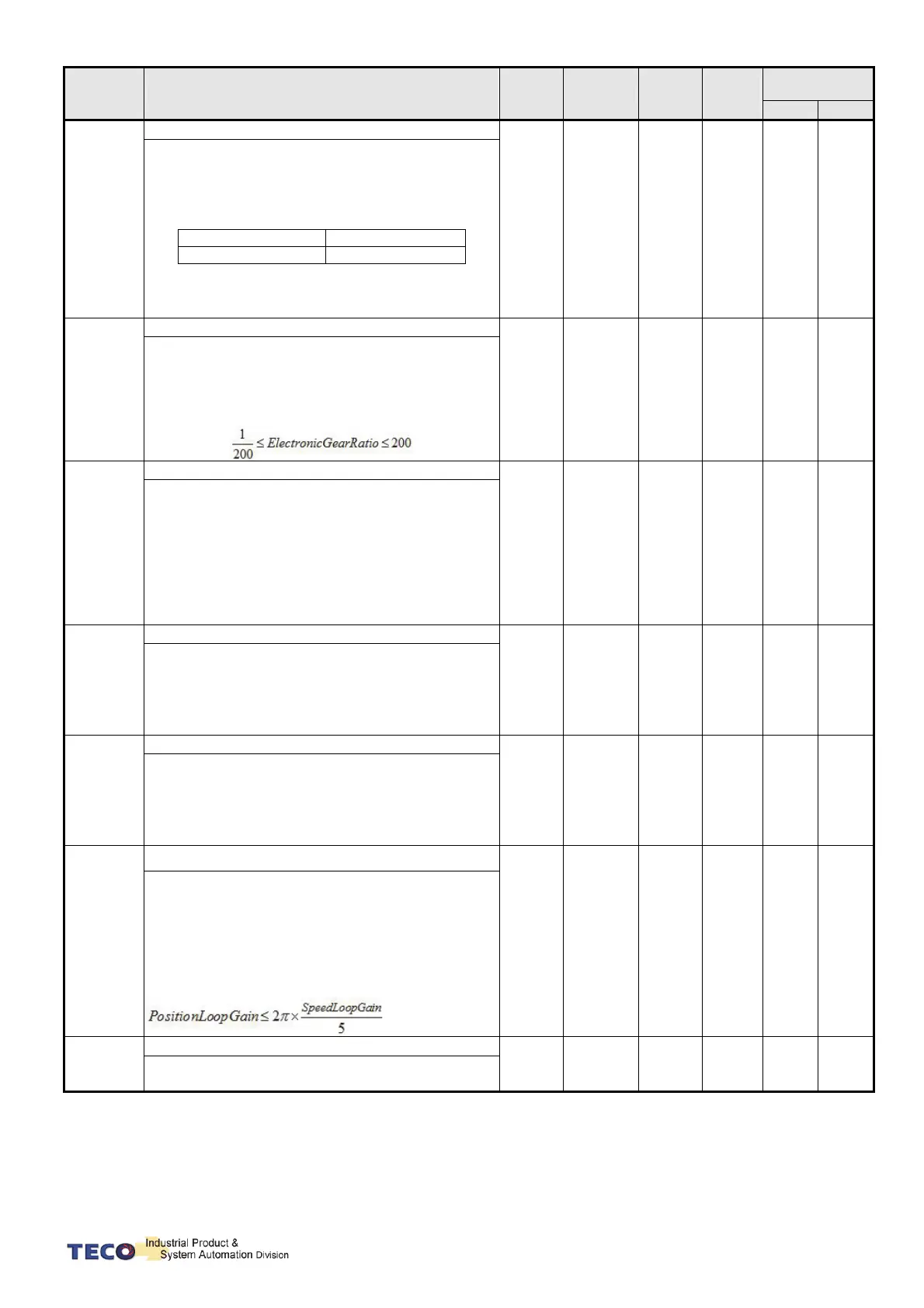
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
Communication
Address
RS232 RS485
Pn305
Electronic Gear Ratio Numerator 4
1 X
1
│
50000
Pi
Pe
563H 0305H
Use input contacts GN1 & GN2 to select one of four
electronic Gear Ratio Numerators.
To select Numerator 4, the statue of the
input-contacts
GN1 & GN2 should be as follows:
Input Contact GN2 Input Contact GN1
1 1
Note: Input contacts status “1” (ON) and “0”
(OFF).
Refer to 5-6-1 to set high or low input logic levels.
Pn306
Electronic Gear Ratio Denominator
1 X
1
│
50000
Pi
Pe
554H 0306H
Set the calculated Electronic Gear Ratio
Denominator
in Pn 306. (Refer to section 5-4-3).
Final Electronic Gear Ratio should comply with the
formula below.
Pn307
Position complete value
10 / 40 pulse
0
│
50000
Pi
Pe
552H
553H
0307H
Set a value for In position output signal.
When the Position pulse error value is less then
Pn307
output-contact INP (In position output signal) will
be activated.
P.S.Use 2500/8192/15bits encoder and tool turret
modes the default is 10.Use 17bits encoder the
default is 40
Pn308
“Incorrect position” Error band Upper limit.
50000
x10 pulse
x131pulse
0
│
50000
Pi
Pe
556H
557H
0308H
When the Position error value is higher then
number of pulses set in Pn308, an Alarm message
AL-11(Position error value alarm) will be displayed.
P.S.Use 2500/8192/15bits encoder the unit is 10
pulse.Use 17bits encoder the unit is 131pulse
Pn309
Incorrect position” Error band lower limit.
50000
x10 pulse
x131pulse
0
│
50000
Pi
Pe
558H
559H
0309H
When the Position error value is lower then number
of pulses set in Pn309, an Alarm message
AL-11(Position error value alarm) will be displayed.
P.S.Use 2500/8192/15bits encoder the unit is 10
pulse.Use 17bits encoder the unit is 131pulse
Pn310
Position Loop Gain 1
40 1/s
1
│
1000
Pi
Pe
55AH 030AH
Without causing vibration or noise on the
mechanical system the position loop gain value can
be increased to speed up response and shorten the
positioning time.
Generally, the position loop bandwidth should not
be higher then speed loop bandwidth. The
relationship is according to the formula below:
Pn311
Position Loop Gain 2
40 rad/s
1
│
1000
Pi
Pe
551H 030BH
Refer to Pn310

 Loading...
Loading...
