69
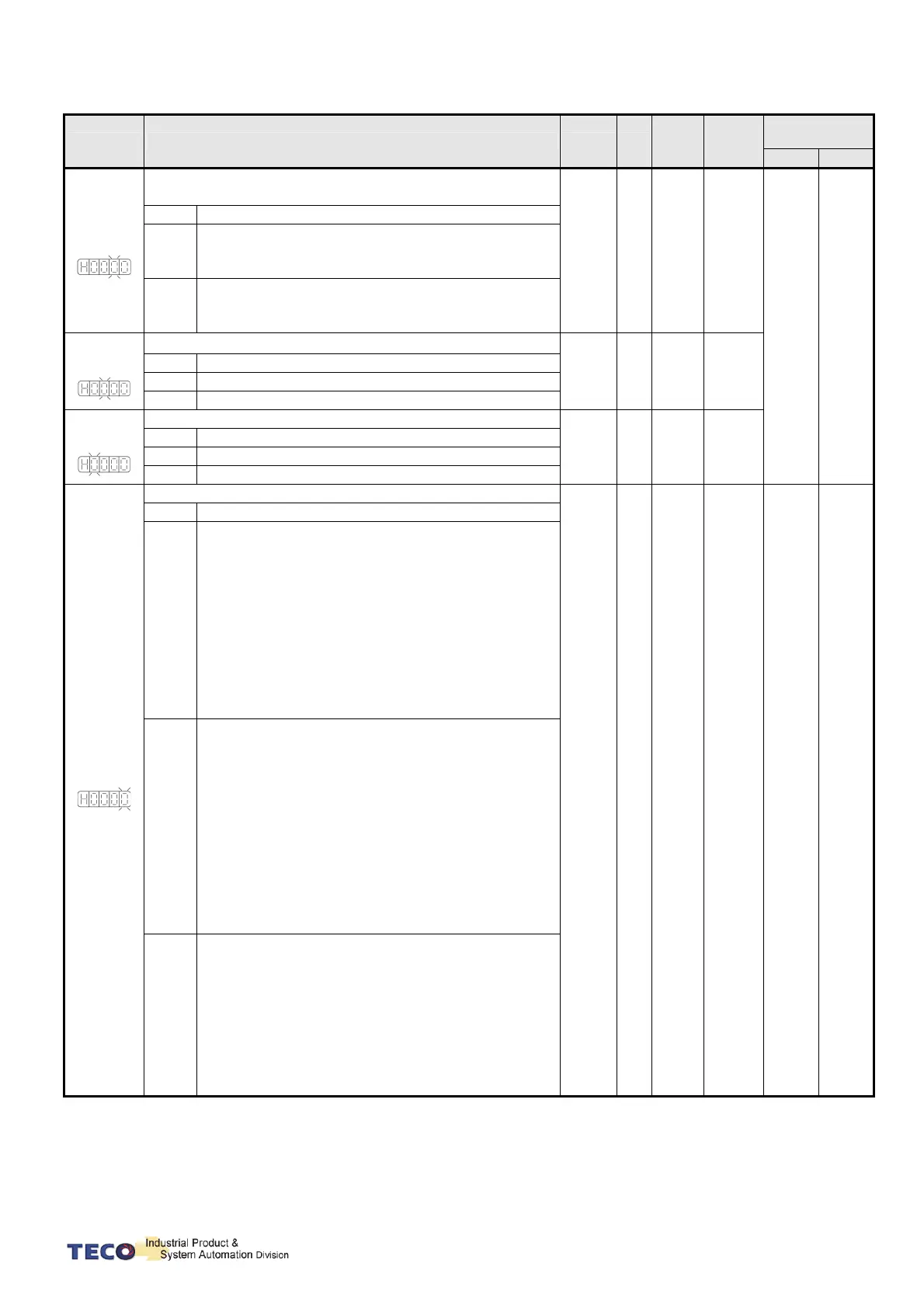
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
Communication
Address
RS232 RS485
★
Pn316.1
Internal Position Command Hold (PHOLD) program
select
0 X
0
│
1
Pi
50DH 0310H
Setting Explanation
0
When PHOLD is active then received PTRG signal.
Servomotor will be proceeded internal position
command from PHOLD position.
1
When PHOLD is active then received PTRG signal.
Servomotor will operate internal position command
of current selection.
★
Pn316.2
Encoder Feedback Dividing Phase Leading Selection
0
X
0
│
1
ALL
Setting Explanation
0 Encoder feedback phase A leading phase B.
1 Encoder feedback phase B leading phase A.
★
Pn316.3
Encoder Feedback Dividing
0
X
0
│
1
ALL
Setting Explanation
0 According to Cn005
1 According to Cn005/4
Pn317.0
Setting for HOME routine
0 X
0
│
5
Pi
Pe
54AH 0311H
Setting Explanation
0
Once the home routine is activated, motor will searc
for Home Position switch in 1
st
speed in CCW direct
Input contacts CCWL or CWL can be used as the
Home Reference Switch.
Once Home reference switch is detected, then inpu
Contacts CCWL and CWL will act as normal Max
limits again.
Note:
When using this function, Pn365.1 can not be set to
or 2. Cn002.1 (selection for CCWL and CWL)
must be set to set to 0.
1
Once the home routine is activated, motor will search
for Home
Position switch in 1
st
speed in CW direction.
Input contacts CCWL or CWL can be used as the
Home Reference Switch.
Once Home position is detected, then input contacts
CCWL and CWL will act as normal max. limits again.
Note:
When using this function, Pn365.1 can not be set to
1 or 2.
Cn002.1 (selection for CCWL and CWL) must be
set to 0.
2
Once the home routine is activated , motor will
search for Home position switch in 1
st
speed in CCW
direction and sets the Home
reference position as soon as the input contact ORG
is activated.
If Pn365.1=2, it will directly find the closest
Rising-Edge of ORG to be the Home position
(without a need for Home Reference),
then it stops in accordance with Pn365.3 setting.

 Loading...
Loading...
