71
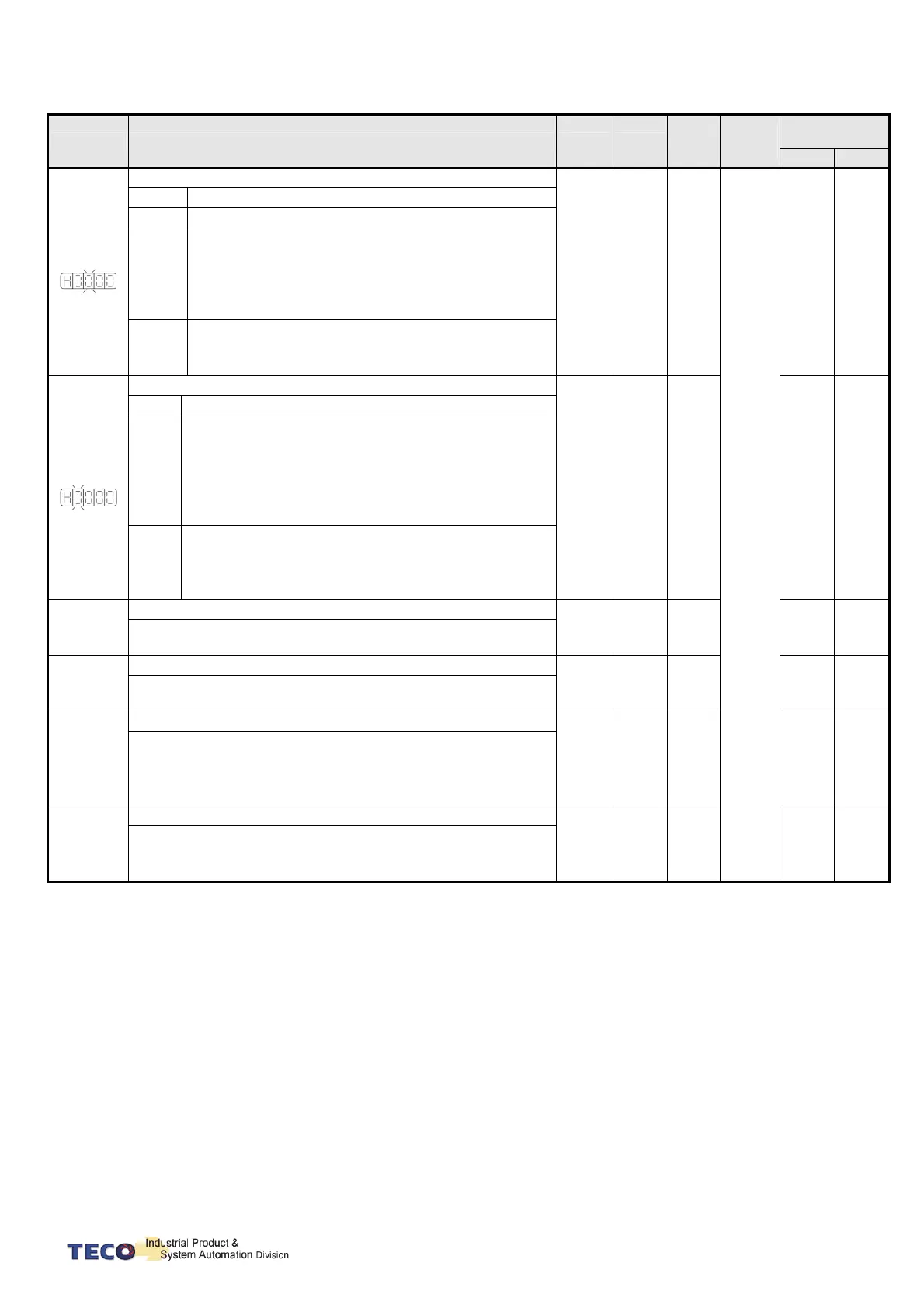
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
Communication
Address
RS232 RS485
Pn317.2
Setting of Home Routine Start method
0 X
0
│
2
Pi
Pe
54AH 0311H
Setting Explanation
0 Homing routine is Disabled.
1
On power up and activation of Servo on the home
routine is started automatically.
This method is useful for applications that do not
require repeated home routines. No external home
reference switch is required.
2
Use SHOME input contactor to start a home routine.
In position mode, SHOME can be used to start a
home routine at any moment.
Pn317.3
Setting of stopping mode after finding Home signal.
0 X
0
│
1
54AH 0311H
Setting Explanation
0
After detecting the Home signal, it sets this position to
be the Home reference (Un-14 encoder feedback
rotating number and Un-15 encoder feedback pulse
number are all 0), motor decelerates and stops.
Then it reverses direction in 2
nd
speed to detect the
Home Position again then it decelerates and stops..
1
After detecting the Home signal, it sets this position to
be the Home reference (Un-14 encoder feedback
rotating number and Un-15 encoder feedback pulse
numbers are all 0), motor decelerates and stops.
Pn318
Machine Home reference search speed. 1
st
speed ( Fast)
100 rpm
0
│
2000
54BH 0312H
HOME Reference search speed. Speed 1.
Pn319
Machine Home position search speed. 2
nd
Speed (Slow)
50 rpm
0
│
500
54CH 0313H
Home position search speed. Speed 2.
Pn320
Home position offset. Number of revolutions.
0 rev
-30000
│
30000
54DH 0314H
Once the searched home position is found in accordance with
Pn317 (Home routine mode), then it will search by a number
of revolutions and pulses set in parameters Pn320 and Pn
321 to find the new (off set) Home position.
Pn321
Home position offset. Number of Pulses.
0 pulse
-32767
│
32767
54EH 0315H
Home Offset position = Pn320(Rotate Number) x
Number of Encoder Pulse per Rotation x 4
+ Pn321(Pulse Number)

 Loading...
Loading...
