73
Parameter Name & Function
Default
Unit
Setting
Range
Control
Mode
Communication
Address
RS232 RS485
Pn331
Turret backlash compensation parameter
0 pulse
-32768
│
32767
Pt C86H 0320H
Set backlash compensation value
Pn332
Accel/decel methods for Internal Position
command
0 x
0
│
2
Pi C69H 0321H
Setting Explanation
0
Smooth acceleration/deceleration for position
command
1
S-curve acceleration/deceleration for internal
position command
2
S-curve acceleration/deceleration separately
for internal position command
Pn333
S-Curve Time Constant Deceleration for Internal
Position Command(TDEC)
1 x0.4ms 1 ~ 5000 Pi C15H 0322H
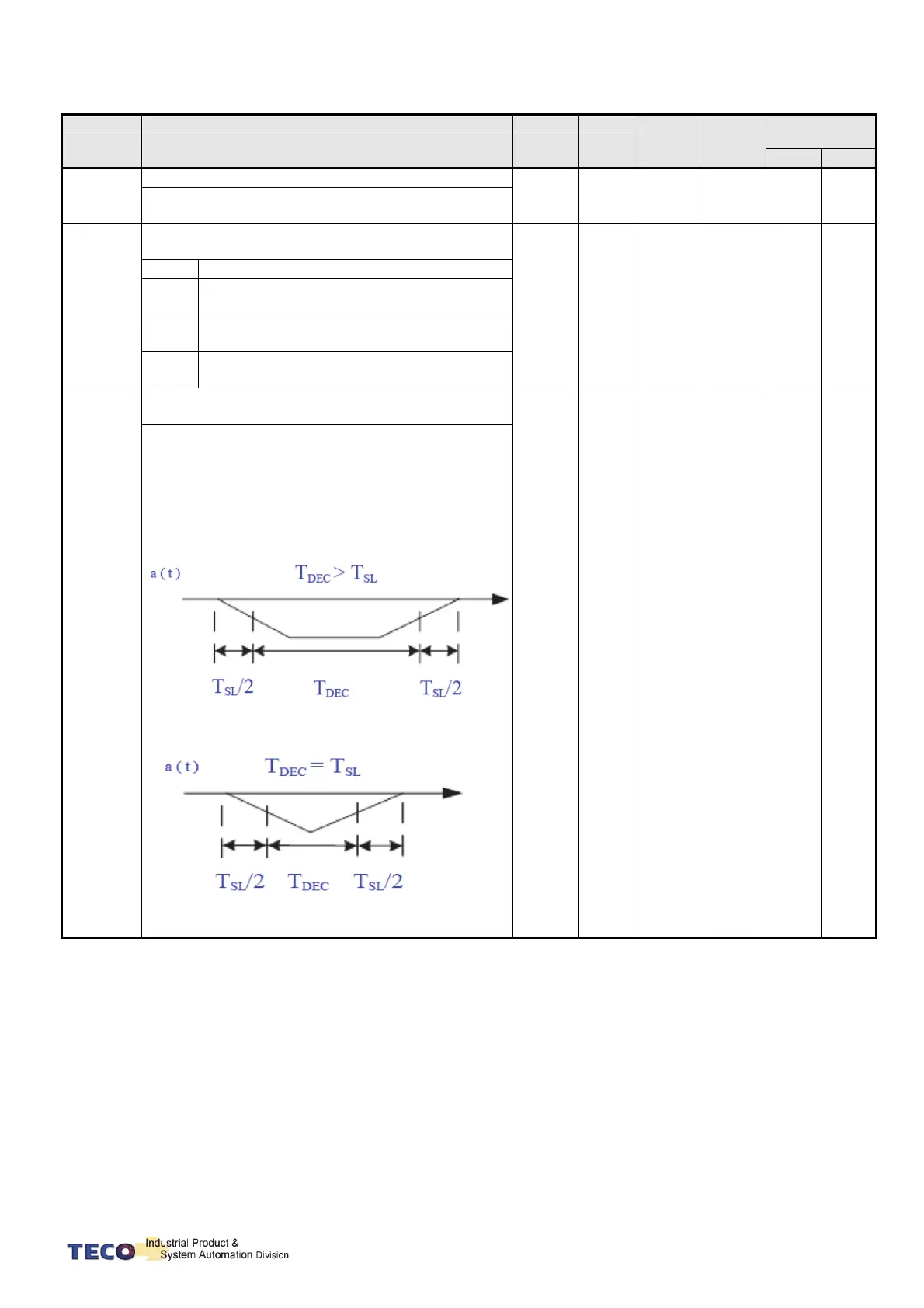
We define the input time parameter are TSL and
TDEC. It judges the dec trip by the setted time
parameter. Figure (a) shows that when TDEC > TSL,
it will generate a constant deceleration region, and the
time of deceleration is TDEC – TSL. Refered to figure
(b), there is no constant deceleration region when
TDEC = TSL, and it can not be define on TDEC<TSL.
(a)
(b)

 Loading...
Loading...
