83
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
Communication
Address
RS232 RS485
★
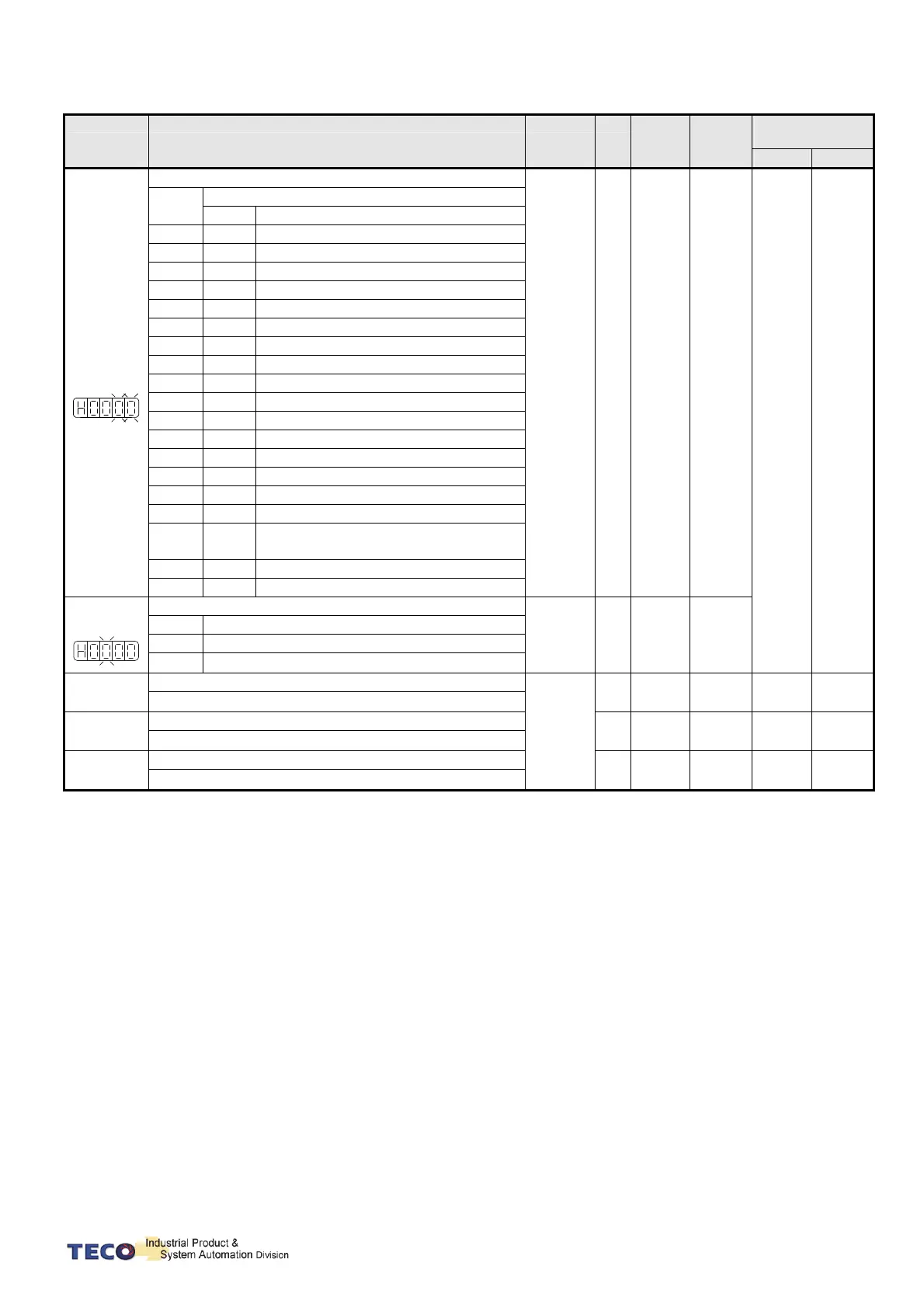
Hn613.0
Hn613.1
DO-1 Functions
Changed
by mode
X
01
│
12
ALL
C47H 050DH
Setting
Explanation
Signal Functions
00
NON
Unused
01
RDY
Servo Ready
02
ALM
Alarm
03
ZS
Zero Speed
04
BI
Brake Signal
05
INS
In Speed
06
INP
In Position
07
HOME
HOME
08
INT
In Torque
09
P1
Position Display 1 for Tool Turret mode
0A
P2
Position Display 2 for Tool Turret mode
0B
P3
Position Display 3 for Tool Turret mode
0C
P4
Position Display 4 for Tool Turret mode
0D
P5
Position Display 5 for Tool Turret mode
0E
P6
Position Display 6 for Tool Turret mode
0F
OL
Motor Over-load Signal
10
BAT
Absolute Encoder Battery Module
Fault
11
LIM
CWL/CCWL Drive Disable Signal
12
VDO
Virtual Digital Output
★
Hn613.2
DO-1 Active Level
0 X
0
│
1
ALL
Setting Explanation
0 Close, when the output is activated.
1 Open, when the output is activated.
★
Hn614
DO-2
Changed
by mode
X
000~
112
ALL C48H 050EH
Please refer to Hn613
★
Hn615
DO-3
X
000~
112
ALL C49H 050FH
Please refer to Hn613
★
Hn616
DO-4
X
000~
112
ALL C4AH 0510H
Please refer to Hn613
New setting will become effective after re-cycling the power.
Warning! If any of programmable Outputs of DO-1 ~ DO-4 are set for the same type of function; then the logic state
selection (NO or NC selection) for these outputs can not be the same type. Otherwise an Alarm will be displayed. AL-07
(Abnormal DI/DO programming).

 Loading...
Loading...
