42
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
Chapter
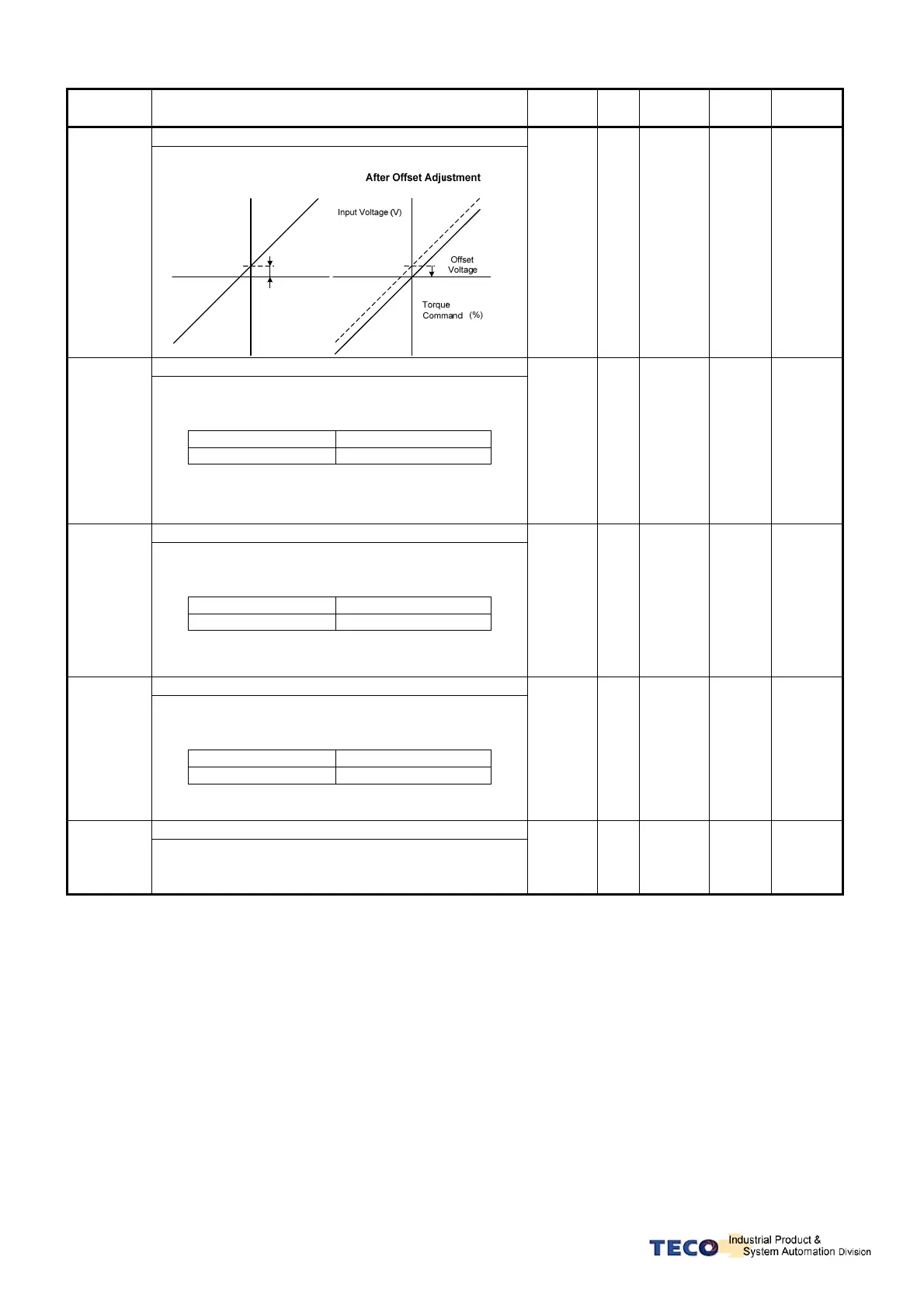
Torque Command, analog input voltage offset
Tn104
The offset amount can be adjusted by this parameter.
Torque
Command
(%)
Input Voltage (V)
Before Offset Adjustment
Offset
Voltage
0 mV
-10000
│
10000
T 5-2-2
Preset Speed Limit 1. ( Torque control mode)
In Torque control, input contacts SPD1 and SPD2 can
be used to select Preset speed limit 1. As follows:
Input Contact SPD2 Input Contact SPD1
0 1
Tn105
Note: Input contacts status “1” (ON) and “0” (OFF).
Refer to 5-6-1 to set high or low input logic levels.
100 rpm
0
│
3000
T 5-2-6
Preset Speed Limit 2. ( Torque control mode)
Tn106
In Torque control, input contacts SPD1 and SPD2 can
be used to select Preset speed limit 2. As follows:
Input Contact SPD2 Input Contact SPD1
1 0
Note: Input contacts status “1” (ON) and “0” (OFF)
Refer to 5-6-1 to set high or low input logic levels.
200 rpm
0
│
3000
T 5-2-6
Preset Speed Limit 3. ( Torque control mode)
Tn107
In Torque control, input contacts SPD1 and SPD2 can
be used to select Preset speed limit 3. As follows:
Input Contact SPD2 Input Contact SPD1
1 1
Note: Input contacts status “1” (ON) and “0” (OFF)
Refer to 5-6-1 to set high or low input logic levels.
300 rpm
0
│
3000
T 5-2-6
Torque output monitor value
Tn108
When the torque level in CW or CCW direction
become greater then this value setting, the output
contact INT is active.
0 %
0
│
300
ALL 5-2-7