31
K10CR1 Cage Rotation Stage
5.12 Minimum and Maximum Position Settings
There are no mechanical end stops on the K10CR1 stage and theoretically, the total
(accumulative) angle of the motion could be arbitrarily large. In practice, however, the
integer arithmetic used for the position counter poses a restriction on the range of
position values that can be represented. To avoid integer overflow and underflow
problems, the target position is checked against the limits displayed in the Min Pos
and Max Pos values. This check is done to ensure that the position counter always
shows a correct value. For the K10CR1 stage, the Min Pos and Max Pos limits are
equivalent to around ±43 full rotations (15,480 degrees).
In applications where continuous rotation is required, the Move At Velocity command
can be used. This command does not constrain the angle to the Min Pos and Max Pos
range and the continuity of the movement will not be interrupted until a Stop command
is issued. However, when the integer representing the position counter overflows, the
position value will flip sign and will no longer be correct. Any application commanding
continuous moves for long period of times must take this into account and accept that
once the Min Pos and Max Pos position is exceeded, the value displayed may no
longer be correct. Homing the stage will zero the position count and correct the
display.
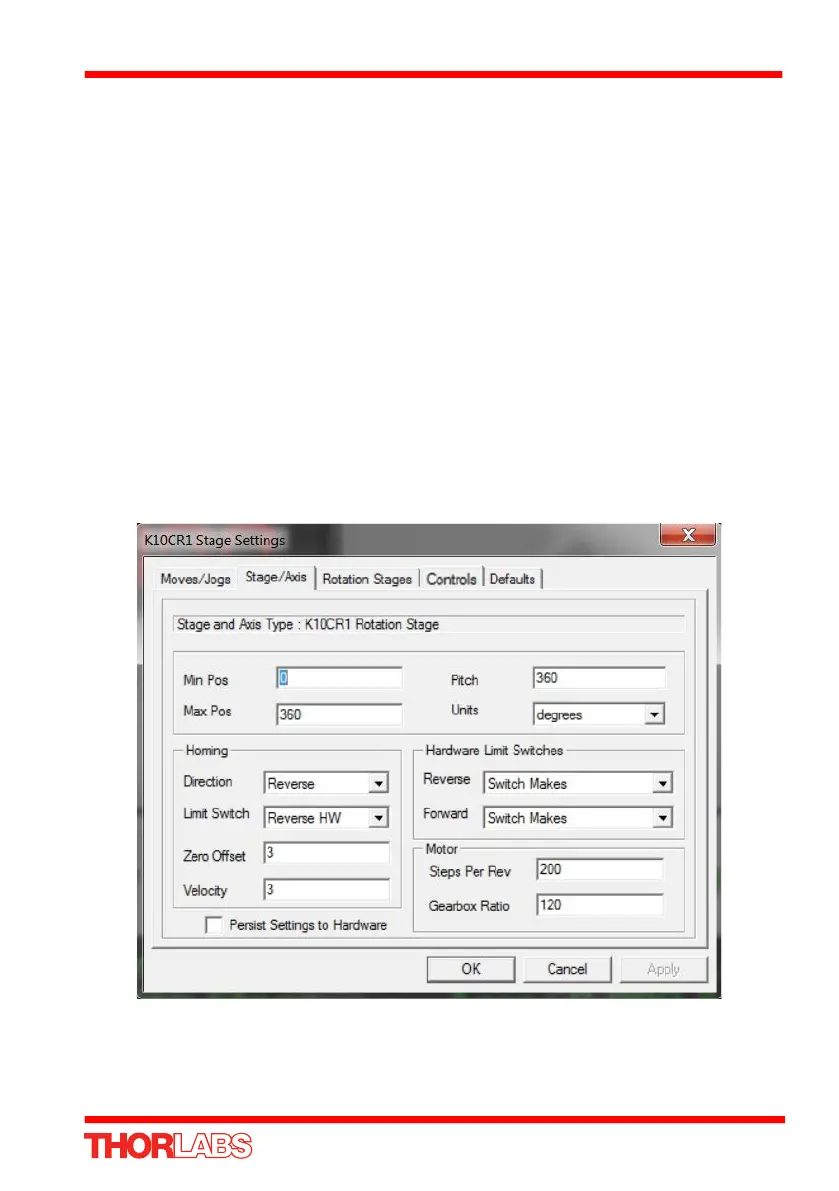
Fig. 5.14 K10CR1 Stage/Axis Settings Tab

 Loading...
Loading...