– 31 –
Note: When the double solenoid is defined by the user parameter, two (2) hand
output signals are output exclusively through the teach pendant. These
two (2) output signals for the double solenoid should be programmed by the
robot language, however, so that they can be exclusive during automatic
operation. Also, even if the double solenoid is defined, both two (2) output
signals turn off when the controller power is turned on.
In the commands of OPEN1, OPEN2, CLOSE1, CLOSE2, OPENI1,
OPENI2, CLOSEI1 and CLOSEI2, each set of signals (201, 202) and (203,
204) is exclusively output.
The hand output signal cannot be reset by the RESET SIG or RESET
DOUT command.
The specifications of the hand output signal are as follows:
• Output type: Photo MOS output
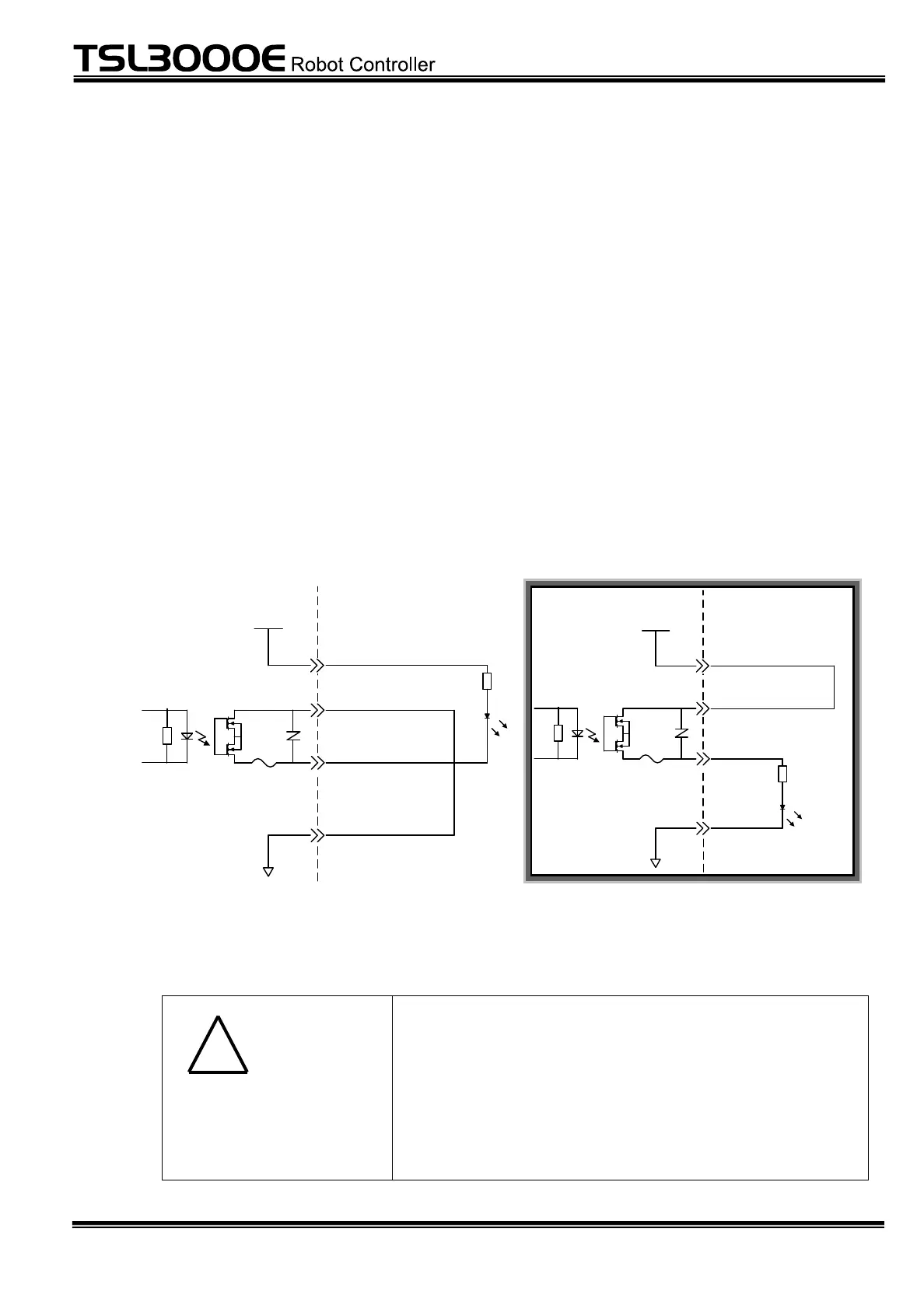
• Output circuit structure:
User side
[P24G(-) common connection]
P24V
P24G
SYSOUTCOM
DOUT_20*
[Sink type (- common)]
User side
[P24V(+) common connection]
P24V
P24G
SYSOUTCOM
[Source type (+ common)]
DOUT_20*
• Electric rating: Rated voltage 24 V DC
• Rated current: 100 mA (max.)
If the current which exceeds the rated output current is
supplied, the output device may be damaged or the
printed board may be burnt. To avoid this, be sure to
use within the rated output current.
Amperage of eight (8) hand output signals should be
0.8 A or less. When using the hand I/O function,
connect from the EXT I/O P24V supply cable of the
controller front panel.
 Loading...
Loading...







