Printed in the Federal Republic of Germany TR-Electronic GmbH 2020, All Rights Reserved
10/07/2020 TR-ECE-BA-GB-0163 v03 Page 43 of 91
7.2 Instance 101, TR Grey Input
All non-safety-related data of the measuring system are output via Instance 101, Members 1 to 3.
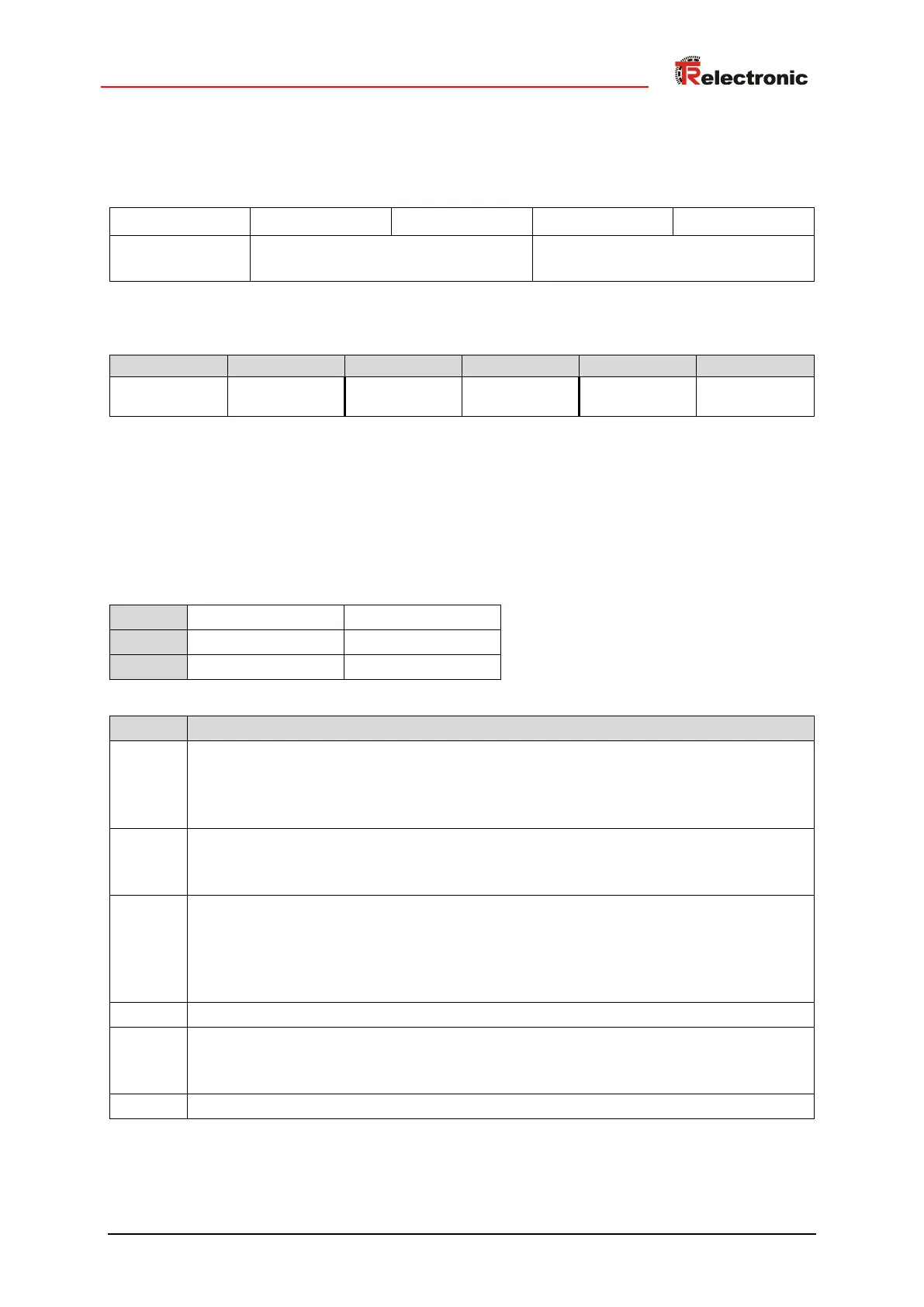
Input word structure 0 to 4, Measuring system -> Originator
IW 0 IW 1 IW 2 IW 3 IW 4
TR Grey –
Status
Position Value Unsigned TR Grey – Velocity
Link path, Packed EPATH with 8-bit class
Class #4
Instance #65
Logical Type =
Attribute ID
Attribute ID #3
7.2.1 Input TR Grey – Encoder Status
The current, non-safety-related measuring system status is output via the Member TR Grey –
Encoder Status:
Input word IW 0, WORD
0 1
7-0 15-8
2
– 2
2
– 2
Bit Function
0
Adjustment execution – positive feedback
0: Normal operation, no error
1: Adjustment was carried out
For the execution of the adjustment function, see Chapter 7.3 on Page 45.
1
Output of the original position
0: Position incorrect, channel in error status
1: Output of the original position
2
Output of the substitute position
0: no substitute position output
1: Output of the substitute position
The substitute position (Position substitution = On) must be set accordingly, see
Chapter 9.1.15, Page 64.
3-6 unused
7
Adjustment execution – Negative feedback
1: Adjustment was not carried out
For the execution of the adjustment function, see Chapter 7.3 on Page 45.
8-15 unused