1. Press the Emergency Stop button on the Teach Pendant.
2. Observe the robot stops and shuts off power to the joints.
3. Power on robot again.
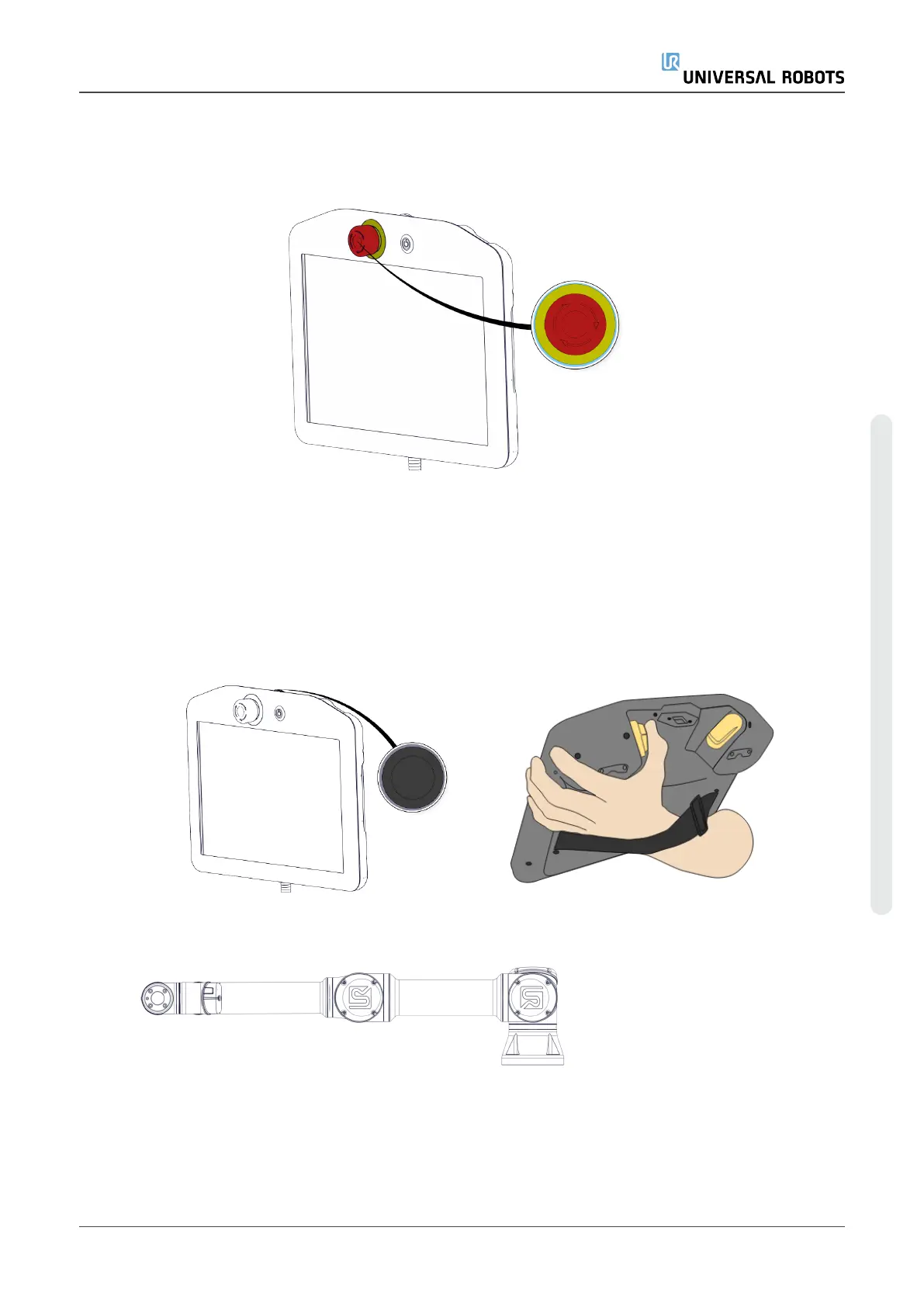
Freedrive
1. Unmount attachment or set TCP/Payload/CoG according to tool specifications.
2. To move the robot arm in Freedrive:
•
On a standard Teach Pendant, press and hold the Freedrive button.
•
On a 3PE Teach Pendant, rapidly light-press, then light-press-and-hold the 3PE button.
Standard TP 3PE TP
3. Pull/Push the robot to a horizontally elongated position and release.
4. Verify the robot arm can maintain the position without support and without pressing the
Freedrive, or 3PE button.
Service Manual 13 e-Series
3.Recommended Inspection Activities
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












