Backdrive
If the robot arm is close to colliding with something, you can use the Backdrive function to move
the robot arm to a safe position before (re)initializing it.
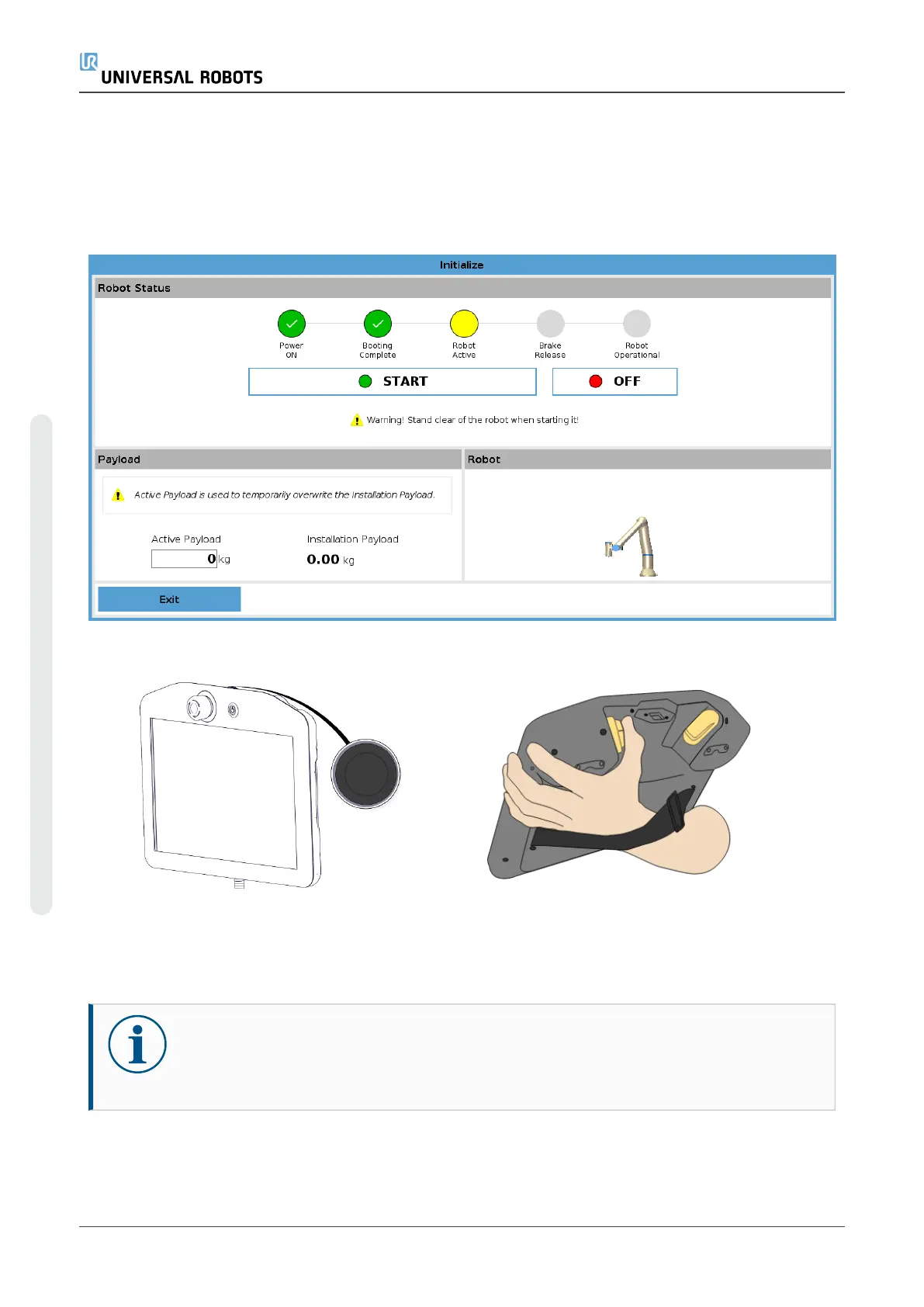
1. Press ON to enable power. Status changes to Robot Active
2. Press and hold Freedrive. Status changes to Backdrive
Standard TP 3PE TP
3. Move robot as in Freedrive. Joint brakes are released where needed once the Freedrive
button is activated.
NOTICE
The robot arm is “heavy” to move around in Backdrive, so efort is required to move
the joints.
e-Series 14 Service Manual
3.Recommended Inspection Activities
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












