High Definition LiDAR Sensor
Velodyne LiDAR, Inc.
©
2019
To activate dual returns and set the return priority, issue a serial command of the case sensitive format:
.
#HDLRETS$ Strongest return only, this is the default setting.
.
#HDLRETL$ Last return only.
.
#HDLRETB$ Both strongest and last returns. If the strongest return is equal to the last
return, the next strongest return is reported.
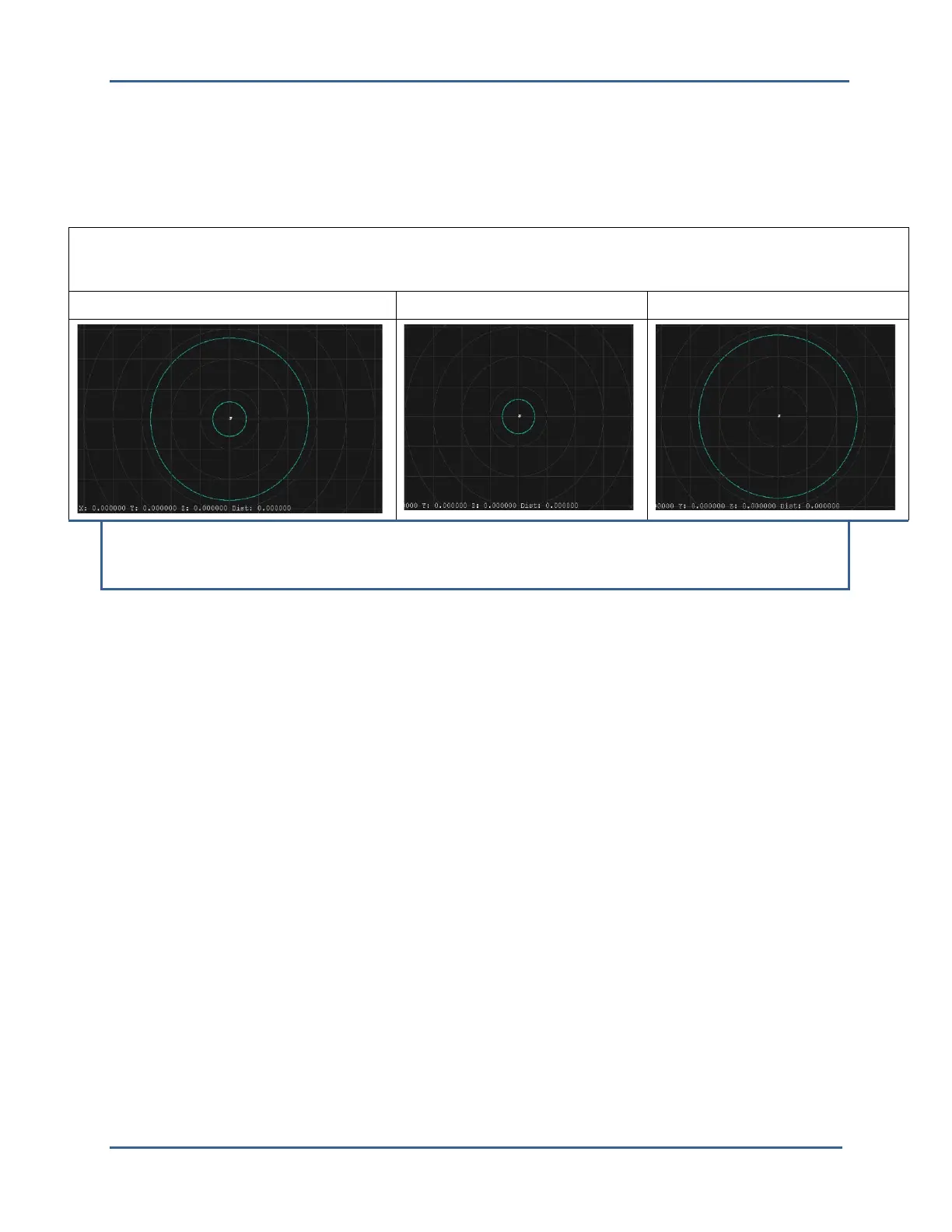
Example: A box is 5 meters from the sensor. The laser partially hits the box and gets the strongest signal. Another box
is 20 meters from the sensor. The laser partially hits the second box and generates the last return. The sensor is not
moving, so the returns generate circle patterns.
Both Strongest and Last Returns
Only Strongest Return
Only Last Return
NOTE: The X, Y, Z and distance figures at the bottom of the image represent the distance of the x, y, z
crosshairs with respect to the origin point indicated by the small white circle. The concentric gray circles
and grid lines represent 10 meter increments from the sensor.

 Loading...
Loading...




