HDL-64E S3 High Definition LiDAR Sensor Page 13
Available Serial Commands HDL-64E S3
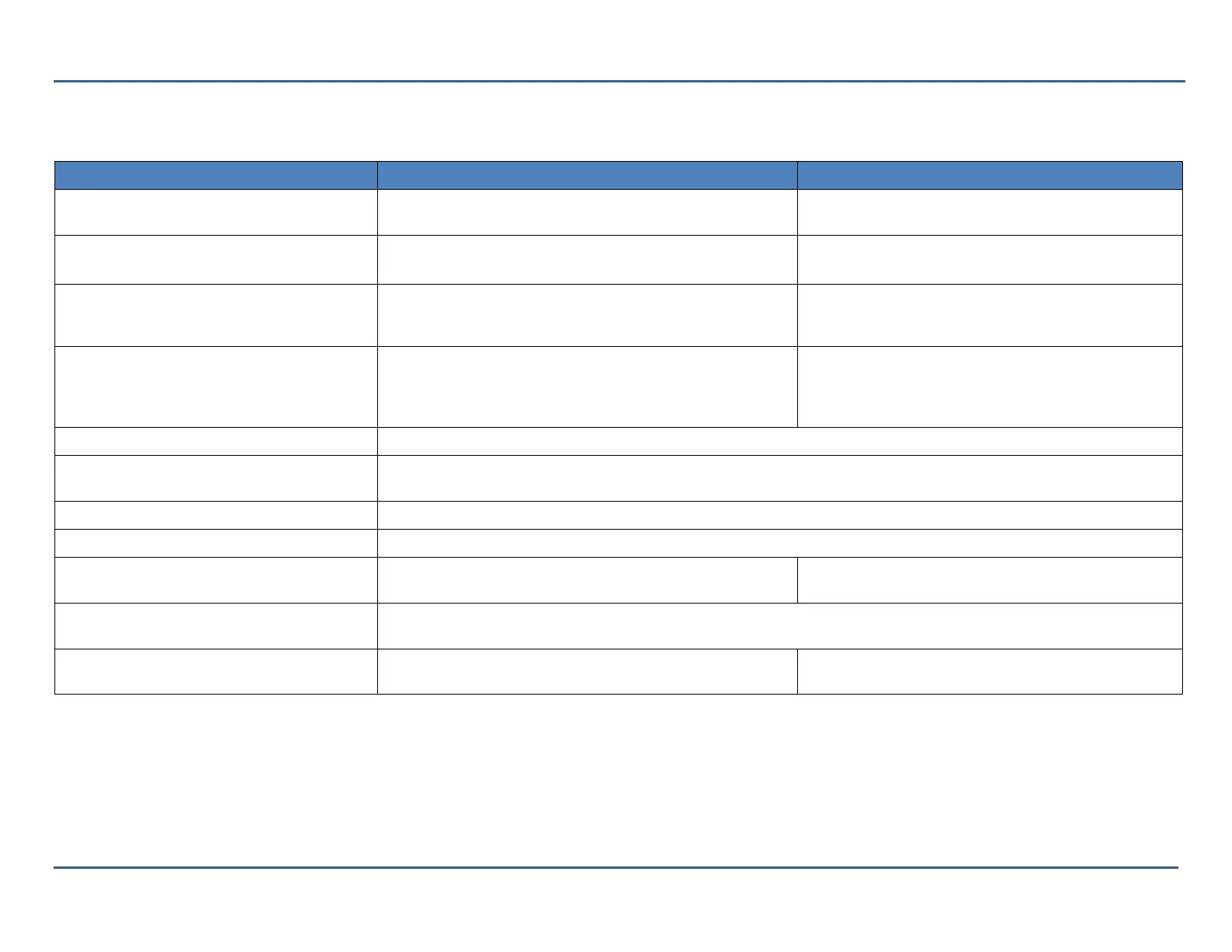
More information about these commands is on the pages following the table below.
Command
Description
Parameters
#HDLRPMnnnn$
Set spin rate from 0300 to 1200 RPM in flash
memory. (default is 0600 RPM)
• nnnn is an integer between 0300 and 1200
#HDLRPNnnnn$
Set spin rate from 0300 to 1200 RPM in RAM (default is
0600 RPM)
• nnnn is an integer between 0300 and 1200
#HDLIPAssssssssssssdddddddddddd$
Change source and/or destination IP address.
•
ssssssssssss is the source 12-digit IP address
• dddddddddddd is the destination 12-digit IP
#HDLFOVsssnnn$
Change horizontal Field of View (HFOV).
• tsss = starting angle in degrees; sss is an
integer between 000 and 360
• nnn = ending angle in degrees; nnn is an
ineger between 000 and 360
#HDLRETS$
Strongest return only, this is the default setting.
#HDLRETB$
Both strongest and last returns. If the strongest return is equal to the last return, the next strongest return is
reported.
#HDLRETL$
Last return only.
#HDLPWRA0$
Set auto power for all lasers with return of 8-bit laser raw intensity level and 3-bit laser power output.
#HDLPWRFn8$
Set fixed power for all lasers, with return of 8-bit laser raw
intensity level and 3-bit laser power.
• n =0 - 7
#HDLPWRA8$
Set auto power for all lasers with return of 8-bit laser normalized intensity level and no laser power output. In the
return, the raw intensity data is normalized by the calibration parameters.
#HDLTHDuuulll$
Noise level adjustment.
•
uuu = upper block noise level
•
lll = lower block noise level
Velodyne LiDAR, Inc. ©2019 63-HDL64ES3 REV K

 Loading...
Loading...




