High Definition LiDAR Sensor
Velodyne LiDAR, Inc.
©
2019
4
GPS Timestamp
1
Status Type
1
Status Value
12 Blocks Firing Data
(6 Lower Blocks + 6 Upper Blocks)
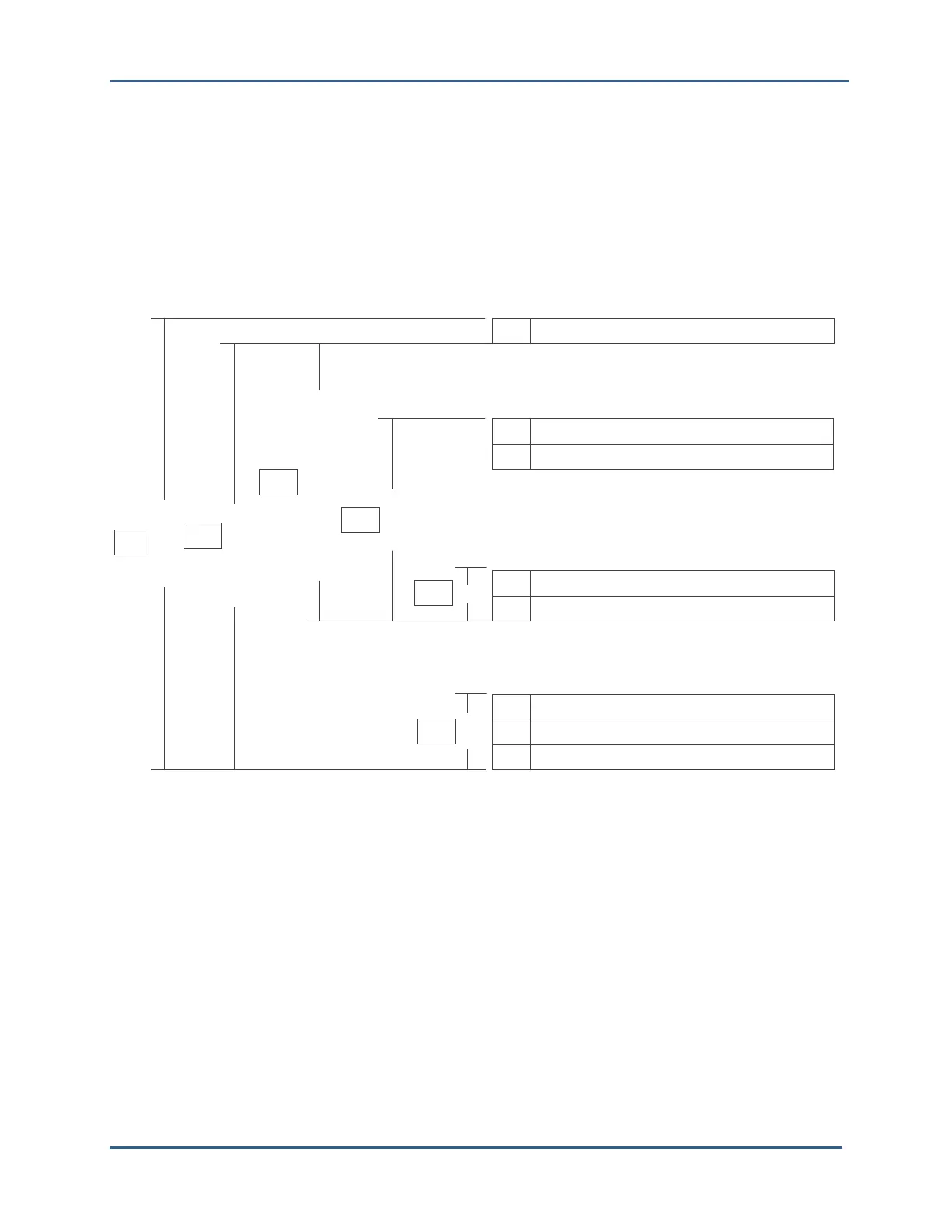
Appendix E: Data Packet Format
The sensor outputs UDP Ethernet packets. Each packet contains a header, a data payload of firing data
and status data. Data packets are assembled with the collection of all firing data for six upper block
sequences and six lower block sequences. The upper block laser distance and intensity data is collected
first followed by the lower block laser data. The data packet is then combined with status and header data
in a UDP packet transmitted over Ethernet.
The status data always contains a GPS 4-byte timestamp representing microseconds from the top of the
hour. In addition, the status data contains one type of data. The other status data rotates through a
sequence of different pieces of information. See datagrams on the following pages.
Data Packet Overview
42 Ethernet Header
Upper = 0xEEFF Lower = 0xDDFF
2
Laser Block ID
2
Rotational Position
1200
Integer 0 – 35999 ( ÷ 100 = degrees from 0)
1248
1206
100
2 mm increments (0 = no return within 150 m)
2 Distance Information
96
1 Intensity
Integer 0 – 255 (255 = most intense return)
Timestamp Bytes in reverse order (µsec)
6

 Loading...
Loading...




