High Definition LiDAR Sensor
Velodyne LiDAR, Inc.
©
2019
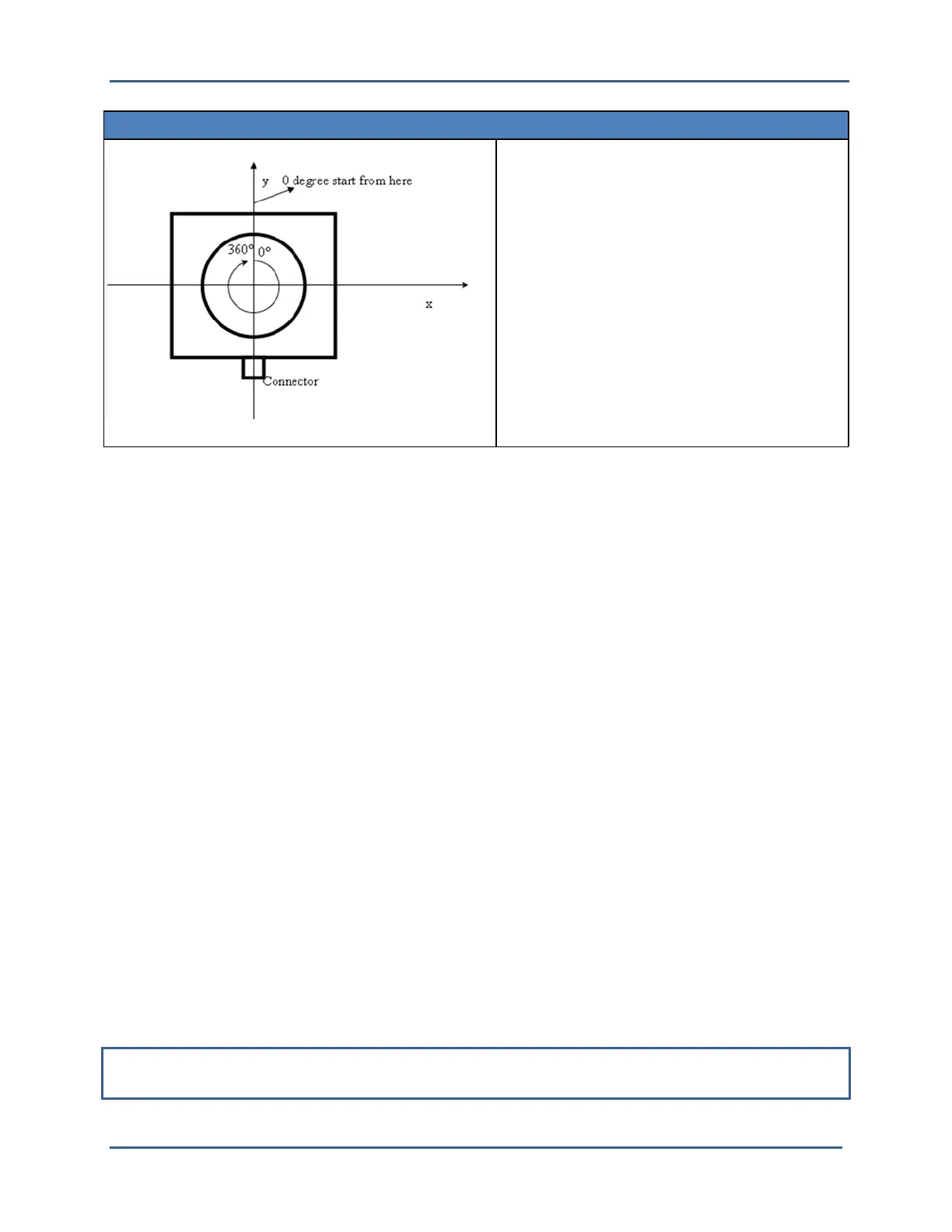
The following diagram shows the HFOV from the top view of the sensor.
Examples of HFOV Command Settings
Case 1: FOV
0°
to
360
°
FOV command:
#HDLFOV000360$
Case 2: FOV
0°
to
90
°
FOV command:
#HDLFOV000090$
Case 3: FOV
-90
°
to
90°
FOV command:
#HDLFOV270090$
Top View of Sensor
Define Sensor Memory IP Source and Destination Addresses
The sensor comes with the following default IP addresses:
.
Source: 192.168.3.043
.
Destination: 192.168.3.255
To change either of the above IP addresses, issue a serial command of the case sensitive format
#HDLIPAssssssssssssdddddddddddd$
where
.
ssssssssssss is the source 12-digit IP address
.
dddddddddddd is the destination 12-digit IP address
Use all 12 digits to set an IP address. Use 0 (zeros) where a digit would be absent. For example,
192168003043 is the correct syntax for IP address 192.168.3.43.
The unit must be power cycled to adopt the new IP addresses.
Dual Returns
Different environmental conditions require a different priority of the type of distance point returns. Hence,
you can define which distance points (strongest, last or both) have the return priority. This feature is also
known as dual returns.
The packet structure remains unchanged regardless of the option selected.
.
Strongest: This is the normal case.
.
Last: Poor visibility conditions, such as fog and dust, benefit from collecting the distance
return values based on the “last return” scenario. The near field occluding atmosphere is
ignored and the furthest surface return produces a valid distance point. The packet reporting
format remains unchanged for this option.
.
Both: The firmware searches for the strongest and last returns and saves them in a data
packet. In the data packet, the strongest signal is in blocks 1, 3 and 5; the last return is in
blocks 2, 4 and 6. If the strongest signal also happens to be the last signal, the 2nd strongest
signal is output.
NOTE: If the “Last” or “Both” option is selected, the packet data rate increases to 2.1 million data points
per second (MDPS), although the effective point reporting density falls to 1.05 MDPS.

 Loading...
Loading...




