High Definition LiDAR Sensor
Velodyne LiDAR, Inc.
©
2019
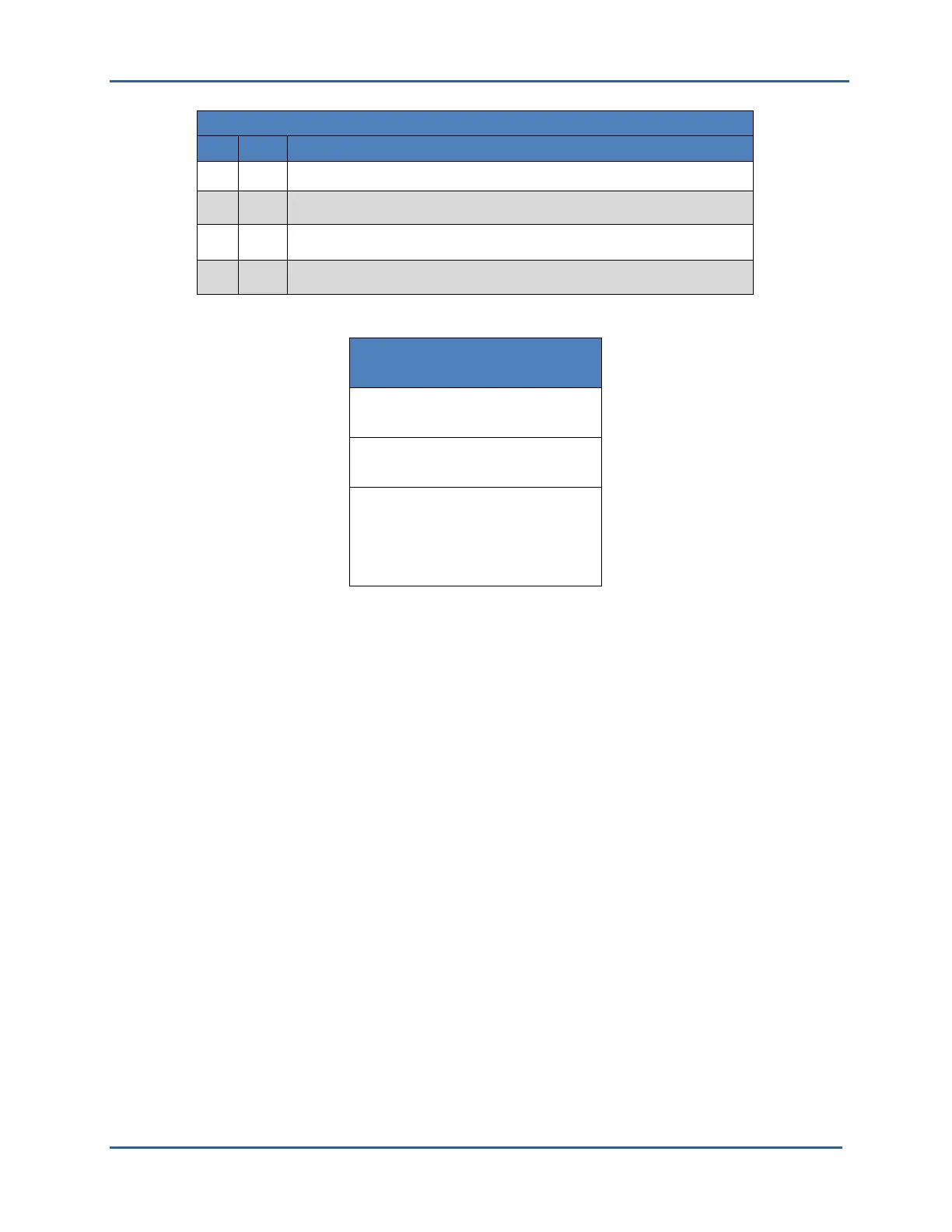
GPS Status Values
41
65
A= GPS receiving both sync signal and NMEA time command record
56
86
V = GPS receiving NMEA time command record only
50
80
P = GPS receiving sync signal only
00
00
0 = GPS not
connected
GPS Timestamp Conversion Example
32-bit Unsigned Integer
1. Original data bytes output
2. Reverse data bytes
3. Convert to Decimal
3595704466
µ
sec
or
Status Type Calibration and Unit Parameters
The last two bytes for status type and status value in the packet rotate to output the sensor information
including, time, GPS status, temperature, firmware, calibration data, and sensor setting parameter, etc.
Status type H, M, S, D, N, Y, G, T and V output once every 16 packets (one cycle).
Calibration data and sensor setting parameters are loaded from the flash memory when the sensor is
powered on and are alternately output in the last 7 packets of the cycle. The whole set of this intrinsic
data needs 4160 packets or 260 cycles (4160 divided by 16 equals 260).
The following table shows status type H, M, S, D, N, Y, G, T and V only once in cycle 1. For table
simplicity, starting from cycle 2, the table only shows the status types of the last 7 packets in the cycles.

 Loading...
Loading...




