High Definition LiDAR Sensor
Velodyne LiDAR, Inc.
©
2019
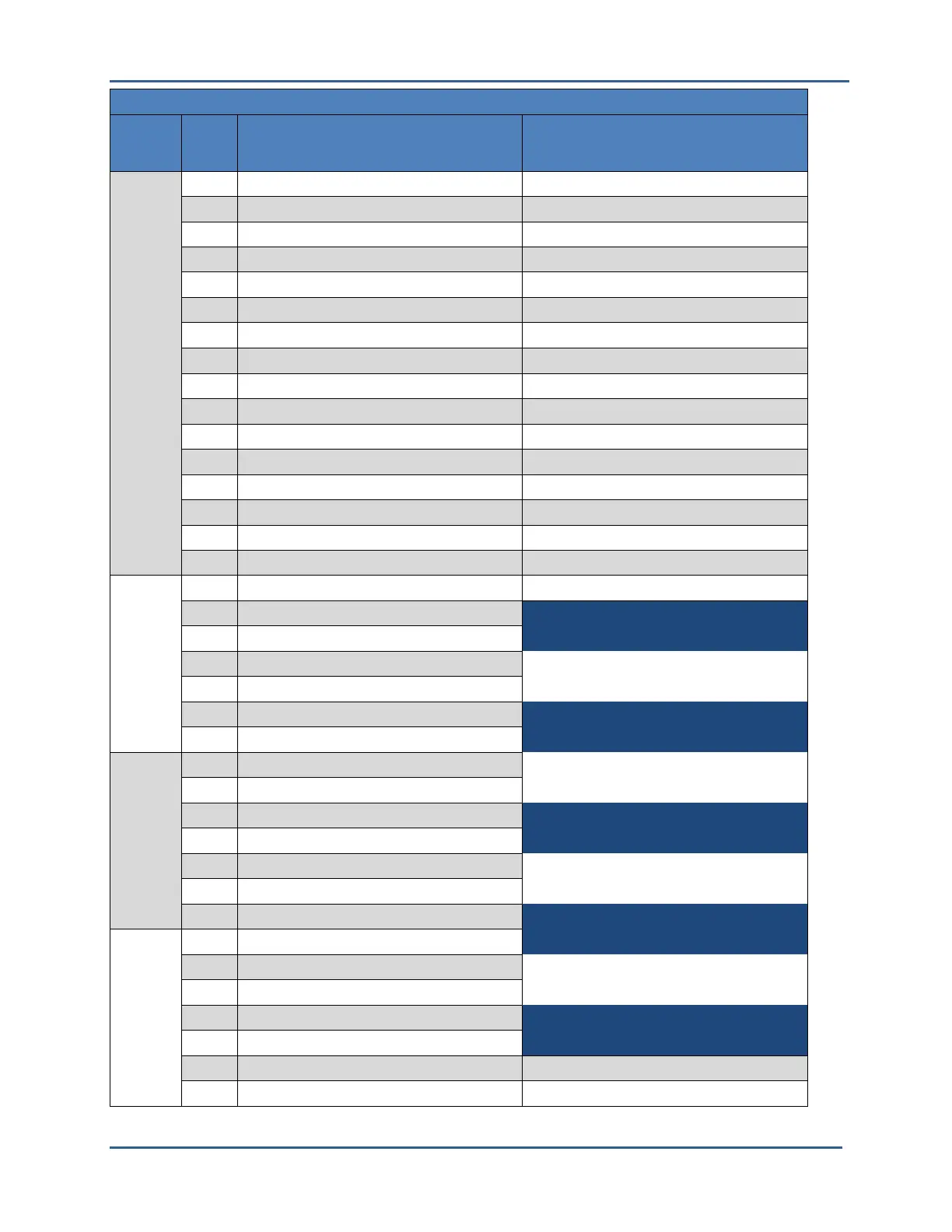
ASCII Value Interpretation
Cycle 1
Integer
Integer
Cycle 2
Integer
Vertical Correction Low Byte
2 Byte Signed Integer ÷100 to Scale
Vertical Correction High Byte
Rotational Correction Low Byte
2 Byte Signed Integer ÷
100 to Scale
Rotational Correction High Byte
Far Distance Correction Low Bye
2 Byte Signed Integer ÷10 for cm
Far Distance Correction High Byte
Cycle 3
Distance Correction X Low Byte
2 Byte Signed Integer ÷
10 for cm
Distance Correction X High Byte
Distance Correction V Low Byte
2 Byte Signed Integer ÷
10 for cm
Distance Correction V High Byte
Vertical Offset Correction Low Byte
2 Byte Signed Integer ÷
10 for cm
Vertical Offset Correction High Byte
Horizontal Offset Correction Low Byte
2 Byte Signed Integer ÷
10 for cm
Cycle 4
Horizontal Offset Correction High Byte
2 Byte Signed Integer ÷
10 for cm
2 Byte Signed Integer ÷
10 to Scale

 Loading...
Loading...




