2.6 Tips for best practice
2.6.1 Multiple sensors connection
Although there is no connection limit in the Xsens DOT app, SDK or BLE services; hardware
and OS constraints of the central devices have a ceiling to the maximum number of sensors
that can be connected simultaneously. For Android, MacOS and Windows, it is possible to
connect up to 7 sensors. In iOS, Linux PC or Raspberry Pi, it is possible to connect up to
11 sensors. The actual connection capability is highly dependent on the device you choose.
However, the BLE performance cannot be guaranteed if the connection limit is reached. If
big data loss or connection failure cases are observed, reduce the sensor connection
number or the transmission payload.
2.6.2 Magnetic distortion
Ferromagnetic material (iron or steel), magnets or strong electrical currents (several
amperes) in the environment near the sensor will cause disturbances to the local magnetic
field. The magnetometer in Xsens DOT sensors is used as a 3D compass to determine the
direction of the Earth true north (heading or yaw) and is used as an absolute reference in
the calculation of 3D orientation. For detailed information about the influence of magnetic
field on orientation, see the PhD thesis “
Inertial and magnetic sensing of human movement
near ferromagnetic materials” D. Roetenberg 2006. For best results when measuring with
Xsens DOT, it is advised to avoid highly magnetized areas when carrying out
measurements, particularly in the beginning of the measurement.
To check the magnetic distortion, you can use the Xsens DOT App to check the Magnetic
Norm
3
in magnetic field data after connecting at least one DOT. Look at the Magnetic Norm
curve while moving in the measurement area.
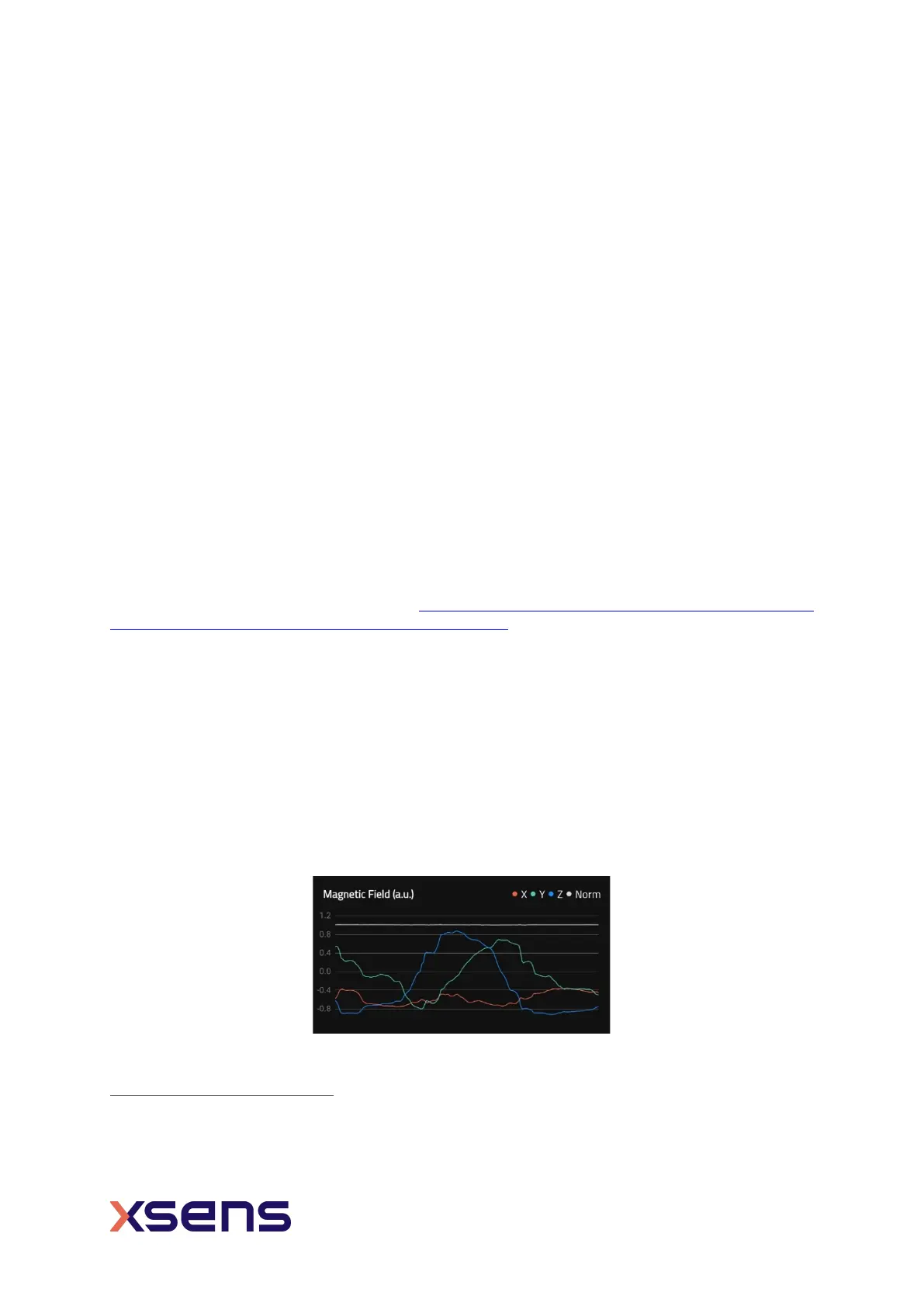
• Areas for which the magnetic norm = 1 and the variation remains within ±0.2 are
magnetic homogeneous and is optimal for carrying out the measurements (see
Figure 5). However, if the measurement begins with a magnetic norm of around 2
or 3, and remains within ±0.2 of this value, the orientation should remain accurate.
• If the Mag Norm will vary depending on the location and orientation of the device
(see Figure 6), there are magnetic distortions in the environment.
Figure 5: Mag Norm is constant while moving
3
Magnetic Norm (Mag Norm) is the norm of all magnetic axis vectors (X, Y and Z) combined. It can
be used as an indication of magnetic distortions.