3 Xsens DOT Overview
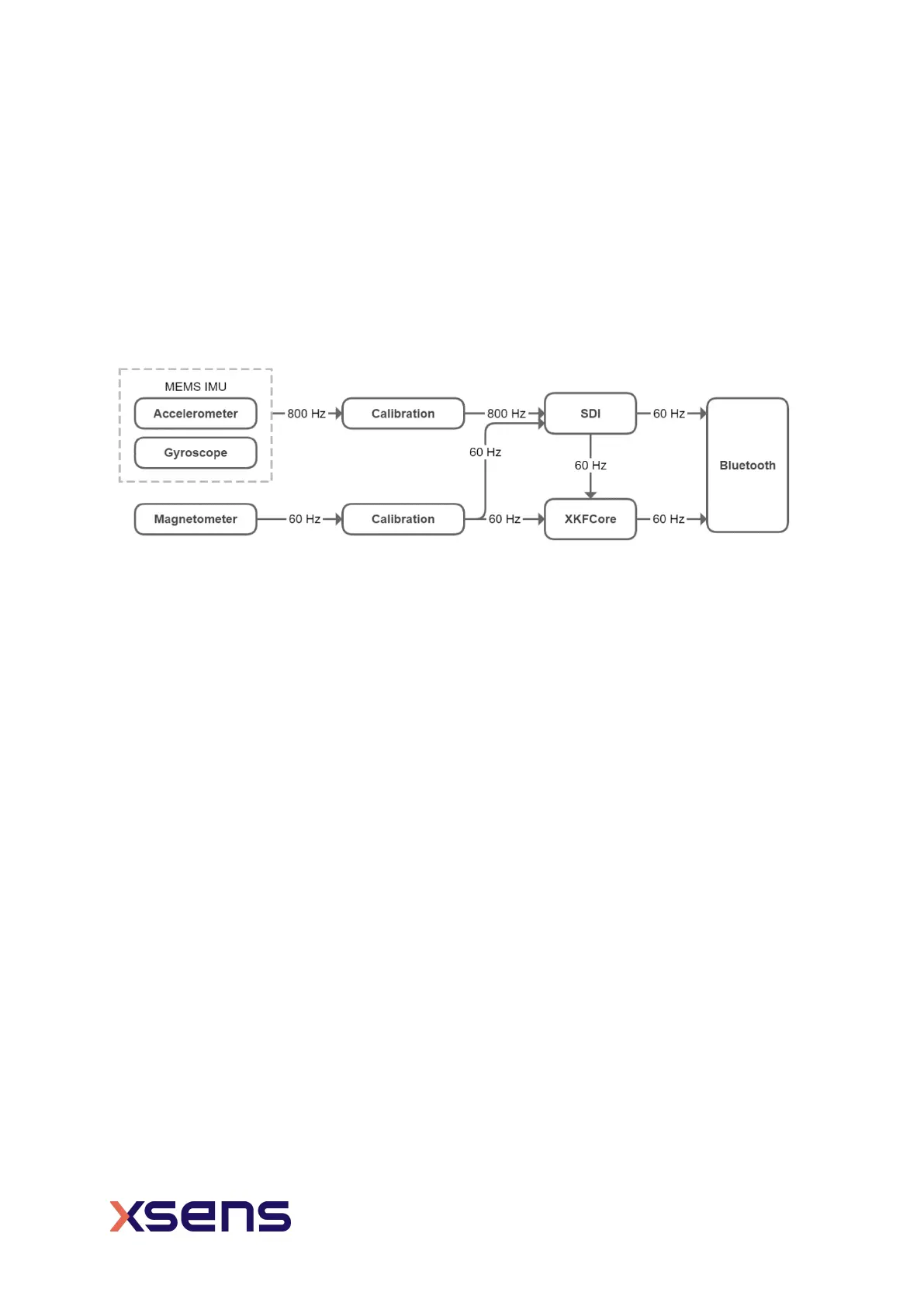
The signal processing architecture of Xsens DOT sensor is presented in Figure 7. The strap
down integration (SDI) and sensor fusion algorithms (XKFCore) are integrated into the
firmware. You can obtain the orientation increments and velocity increments from SDI, as
well as the 3D orientation and free acceleration from XKFCore. Xsens DOT sensor is factory
calibrated, making it more accurate repeatable and robust.
Figure 7: Xsens DOT signal processing architecture
3.1 Strapdown integration
Strap down integration is a method used to compute orientation and velocity increments
by integrating angular velocity from gyroscope and acceleration from the accelerometer.
The angular velocity and acceleration data are sampled and calibrated at a high frequency
(800 Hz) by the embedded MCU of Xsens DOT sensor to maintain accuracy under dynamic
movements such as running and jumping. Due to the high sampling frequency, the data
cannot be transmitted via Bluetooth directly and would typically present an excessive
computational load on the receiving host device (e.g., mobile phone). The SDI algorithm
receives the high-rate sensor input and processes it into a lower-rate signal at 60 Hz. The
main advantage of using the SDI algorithm is that the accuracy is maintained, and
information is preserved to ensure precise orientation tracking.
The SDK data parser has built-in functions to convert SDI quantities to calibrated angular
velocity (rad/s) and acceleration (m/s2) data. Refer to data conversion sections in SDK
programming guides.
3.2 Sensor fusion algorithm and filter profiles
The 3D orientation of the sensor is computed by Xsens’ latest Kalman filter core algorithm
(XKFCore) for sensor fusion, which is optimized for human motions. It uses the output
from SDI to compute a statistical optimal 3D orientation estimate of high accuracy, with
no drift for both static and dynamic movements. The XKFCore uses the measurement of
gravitational acceleration and Earth magnetic north to compensate for slowly increasing
errors from the integration of the rate of turn data, and also gives out free acceleration.