Servodrives Dimensional Drawings
Model
SGMP-
QK U W T Screw
dimensions
Output
W
Approx.
Mass
kg (Ib)
Allowable
Radial Load
N (Ibf)
Allowable
Thrust Load
N (lbf)
15AW12B
No key
—
1500
8.6
490 (110)
147 (33)(19.0)
15AW12C
15AW14B 22
(0.87)
3.5
(0.14)
6
(0.24)
6
(0.24)
—
15AW14C
15AW16B 22
(0.87)
3.5
(0.14)
6
(0.24)
6
(0.24)
M6,
depth 10
15AW16C
9.1.5 SGMP-15A Servomotor
III SGMP Servomotors
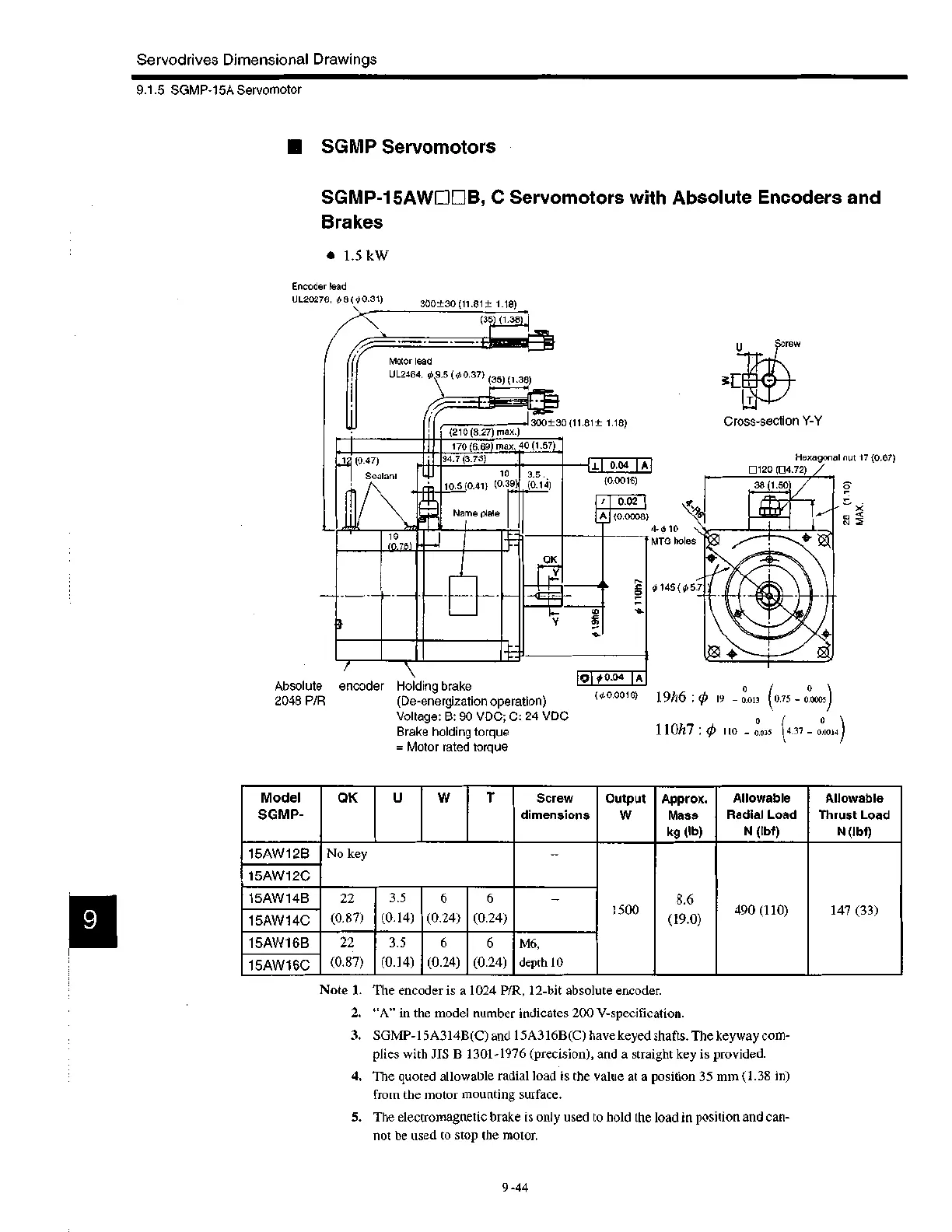
SGMP-15AWODB, C Servomotors with Absolute Encoders and
Brakes
• 1.5 kW
Encoder lead
UL20276, 0 8 (00.31)
300±-30 (11.81± 1.18)
Motor lead
UL2464, 0 9.5 ( 0 0.37) (35) (1.38)
(210 (8.27) max.)
300±30 (11.81-1- 1.18) Cross-section Y-Y
.14 (0.47)
Sealant
170 (6.69) max. 40 (1.57)
94.7 (3.73)
10 3.5.
10.5 (0.41) (0.39) (0.14)
Name plate
19
(0.75)
1
0.04
A
(0.0016)
0.02
A (0.0008
OK
.0
0
8.
Absolute encoder Holding brake
2048 P/R (De-energization operation)
Voltage: B: 90 VDC; C: 24 VDC
Brake holding torque
= Motor rated torque
95 0.04
A
( 0 0.0016)
Hexagonal nut 17 (0.67)
D120 (04.72)
19h6 : 19 - con (0.75 - 00005)
110h7 : 110 - 0.035 (4.37 - 0.o0e4)
Note 1. The encoder is a 1024 P/R, 12-bit absolute encoder.
2. "A" in the model number indicates 200 V-specification.
3. SGMP-15A314B(C) and 15A316B(C) have keyed shafts. The keyway com-
plies with JIS B 1301-1976 (precision), and a straight key is provided.
4. The quoted allowable radial load is the value at a position 35 mm (1.38 in)
from the motor mounting surface.
5. The electromagnetic brake is only used to hold the load in position and can-
not be used to stop the motor.
9 -44
 Loading...
Loading...






