11-6 Standalone Motor and ABB Drive Setup MN448
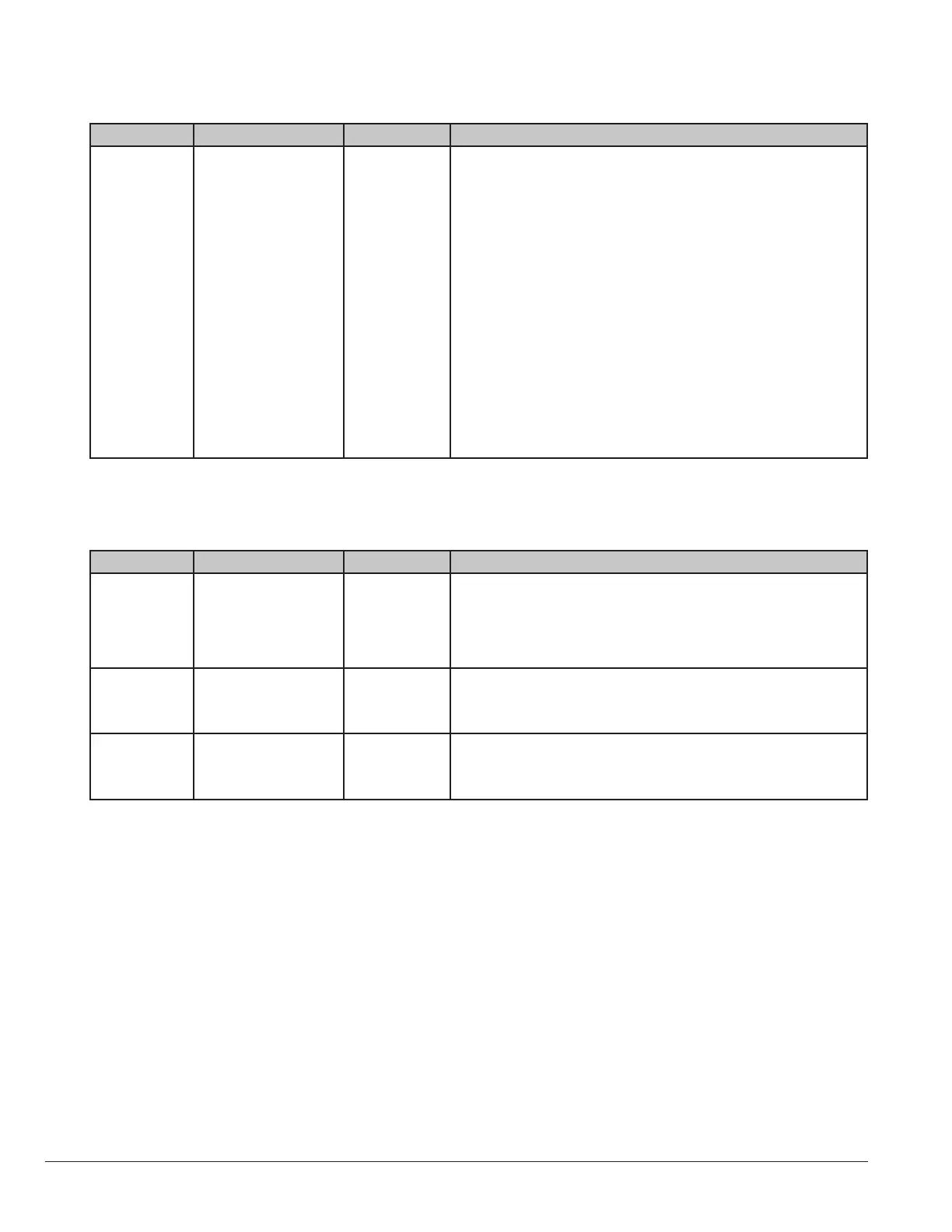
Parameter Name Value Description
21.13 Autophasing mode
0
1
2
Selects the way autophasing is performed during the ID run.
Turning
This mode is recommended for use with the EC Titanium motor
startup. It gives the most accurate autophasing results. This
mode can be used if the motor is allowed to rotate during the ID
run and the startup is not time critical.
Warning: This mode will cause the motor to rotate during the
ID run.
Standstill 1
Faster than Turning mode, but not as accurate. The motor will
not rotate
Standstill 2
An alternate standstill autophasing mode that can be used if
Turning mode cannot be used and the Standstill 1 mode gives
erratic results. This mode is considerably slower than Standsitll
1.
11.7 Group 30 Limits
In order to avoid demagnetization of the motor, the maximum current (30.17) should be set to no higher than 150% of the
motor nominal current.
Parameter Name Value Description
30.17 Maximum Current 1.5 x
Motor
Current
Denes the maximum allowed motor current.
Range: 0.00….30000.00 A
Here set the maximum current value at 1.5 x nominal motor
current (150%).
30.19 Minimum torque 1 Denes a minimum torque limit for the drive (in percent of
nominal motor torque).
Range: -1600.0 … 0.0%
30.20 Maximum torque 1 Denes a maximum torque limit for the drive (in percent of
nominal motor torque).
Range: 0.0 … 1600.00%