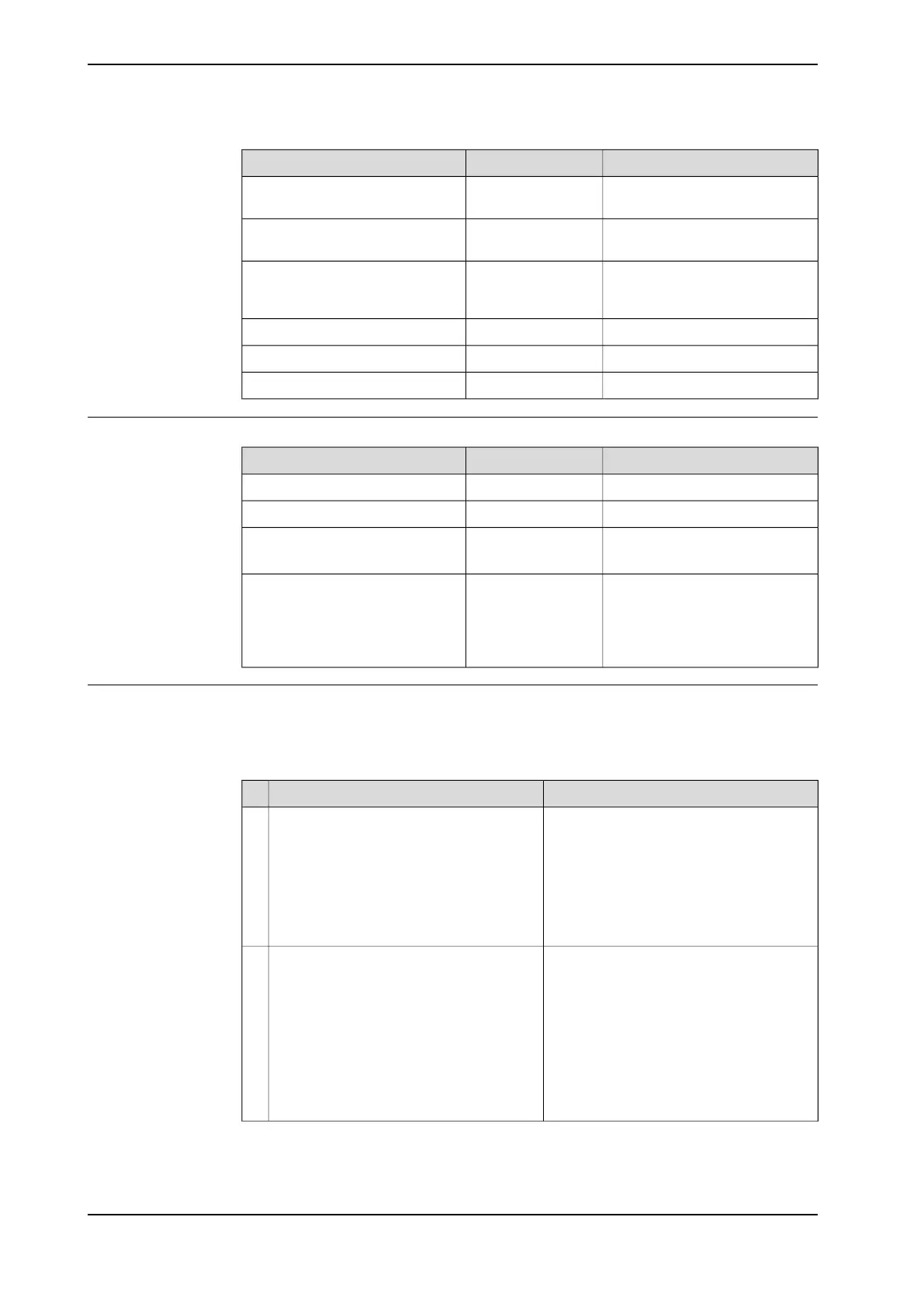
NoteArticle numberEquipment
Used for measuring the timing
belt tension.
-Sonic tension meter
Used for measuring the timing
belt tension.
-Dynamometer
Includes M12 connector as-
sembly tool and Brake release
button assembly tool.
3HAC071022-001Special toolkit
3HAC082535-001Axis-2 radial sealing assembly tool
3HAC082535-003Axis-4 radial sealing assembly tool
3HAC082535-002Radial sealing pressfit tool
Required consumables and wear parts
NoteArticle numberConsumable
-Cable straps
FM 2223HAC029132-001Grease
Harmonic Grease Flexolub-1A
Used to lubricate the seals.
3HAC038379-001Grease
Cooling pads are wear parts. One
cooling pad sheet contains 6
pieces of small pad.
Replace if damaged with one
piece each time.
3HAC071021-001Cooling pad for axis-2 motor
Deciding calibration routine
Decide which calibration routine to be used, based on the information in the table.
Depending on which routine is chosen, action might be required prior to beginning
the repair work of the robot, see the table.
NoteAction
Decide which calibration routine to use for
calibrating the robot.
• Reference calibration. External cable
packages (DressPack) and tools can
stay fitted on the robot.
• Fine calibration. All external cable
packages (DressPack) and tools
must be removed from the robot.
1
Follow the instructions given in the refer-
ence calibration routine on the FlexPendant
to create reference values.
If the robot is to be calibrated with refer-
ence calibration:
Find previous reference values for the axis
or create new reference values. These val-
ues are to be used after the repair proced-
ure is completed, for calibration of the ro-
bot.
Creating new values requires possibility to
move the robot.
Read more about reference calibration for
Axis Calibration in Product manual - IRB
4600.If no previous reference values exist, and
no new reference values can be created,
then reference calibration is not possible.
Continues on next page
182 Product manual - IRB 1010
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
5 Repair
5.4.2 Replacing the axis-1 assembly unit
Continued