NoteAction
Screw: M3x10 12.9 Lafre
2C2B/FC6.9 (2 pcs)
Refit the swing top cover.3
Tightening torque: 1.2 Nm
xx2200000540
Connect the power supply to axis-2 motor and
release the axis-2 brake to move the axis 2 to zero
position. Then, disconnect the power supply.
Note
The robot is not connected to the controller during
replacement, power must be supplied to the con-
nector R1.MP according to the section Supplying
power to connector R1.MP on page 56.
4
Securing the cable package in axis 3
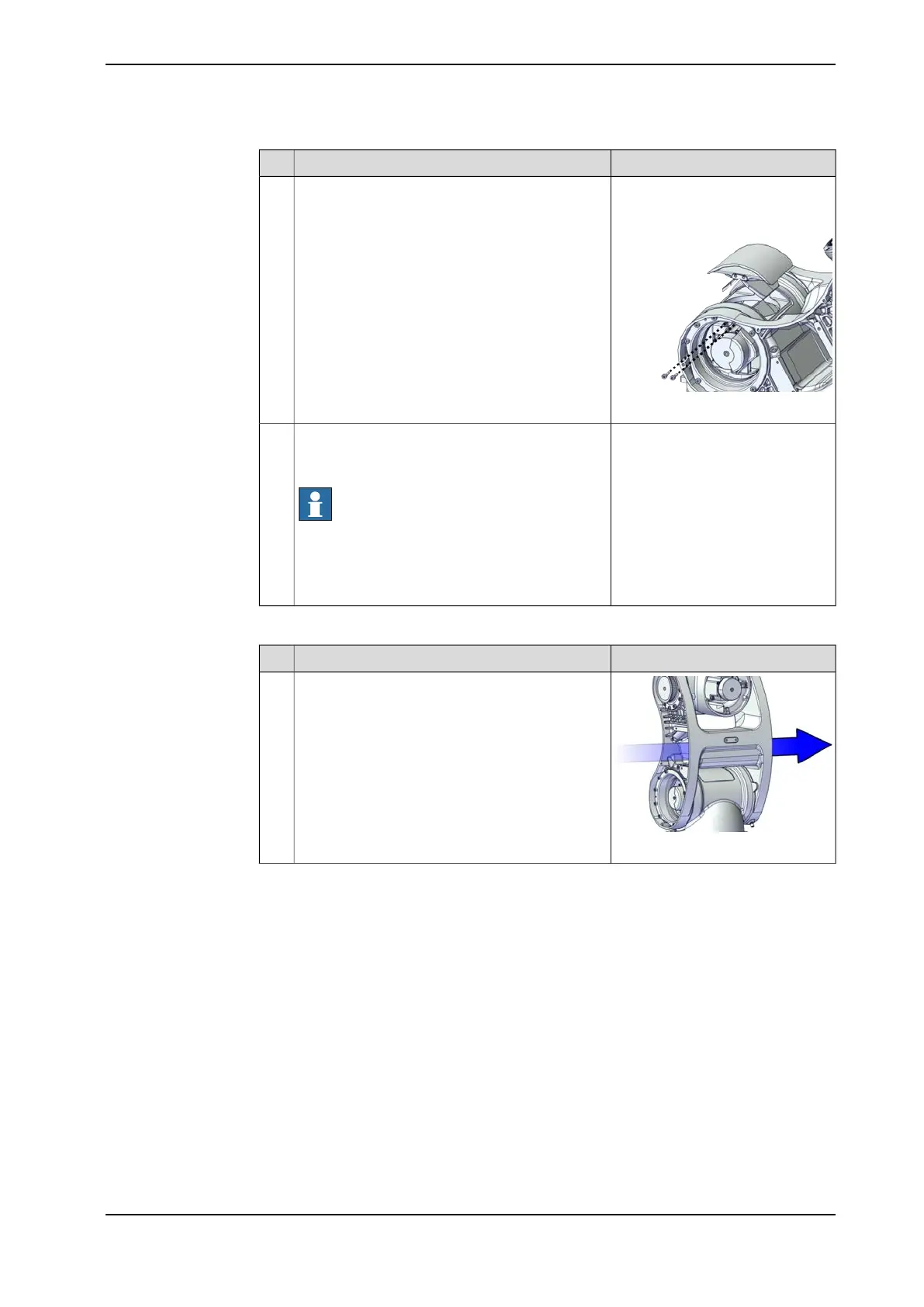
NoteAction
xx2200000097
Route the cable package through the axis 3-4 as-
sembly unit.
1
Continues on next page
Product manual - IRB 1010 211
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
5 Repair
5.4.3 Replacing the axis 3-4 assembly unit
Continued