NoteAction
xx2200000120
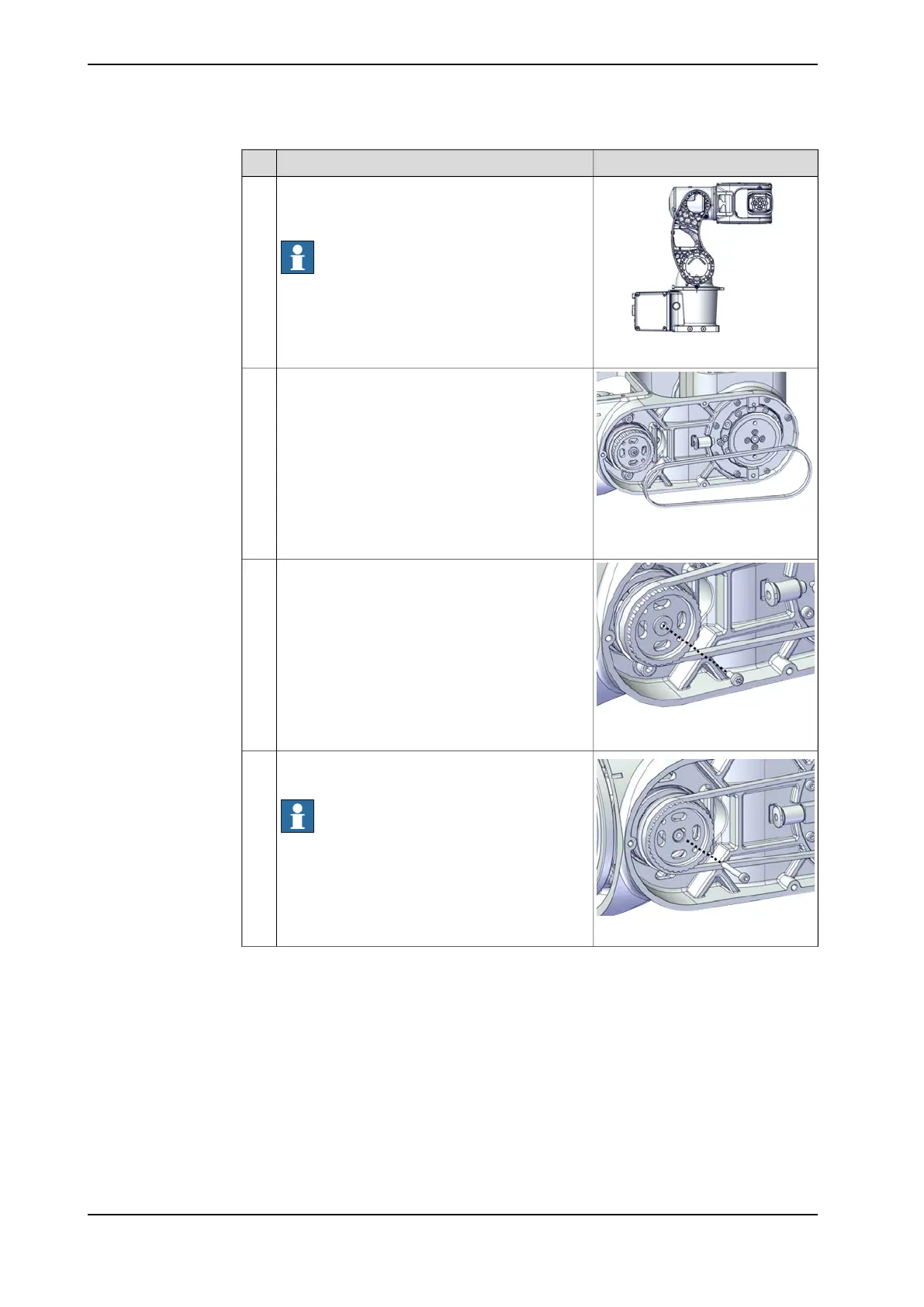
Connect the power supply to axis-4 motor and
release the axis-4 brake to move the axis 4 to -
90°. Then, disconnect the power supply.
Note
The robot is not connected to the controller during
replacement, power must be supplied to the con-
nector R1.MP according to the section Supplying
power to connector R1.MP on page 56.
6
xx2200000043
Install the timing belt to the pulleys and verify that
the belt runs correctly in the grooves of the pul-
leys.
7
xx2200000546
Remove the pulley screw from the motor.8
xx2200000547
Install an M2.5x20 or longer adjustment screw to
the motor.
Note
Do not insert the entire screw to the hole.
The screw shall be installed with proper force to
avoid shaft rotation.
9
Continues on next page
238 Product manual - IRB 1010
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
5 Repair
5.4.4 Replacing the wrist unit
Continued