NoteAction
If the robot is to be calibrated with fine
calibration:
Remove all external cable packages
(DressPack) and tools from the robot.
Removing the axis-2 drive unit
Use these procedures to remove the axis-2 drive unit.
Preparations before removing the axis-2 drive unit
NoteAction
Decide which calibration routine to use, and take
actions accordingly prior to beginning the repair
procedure.
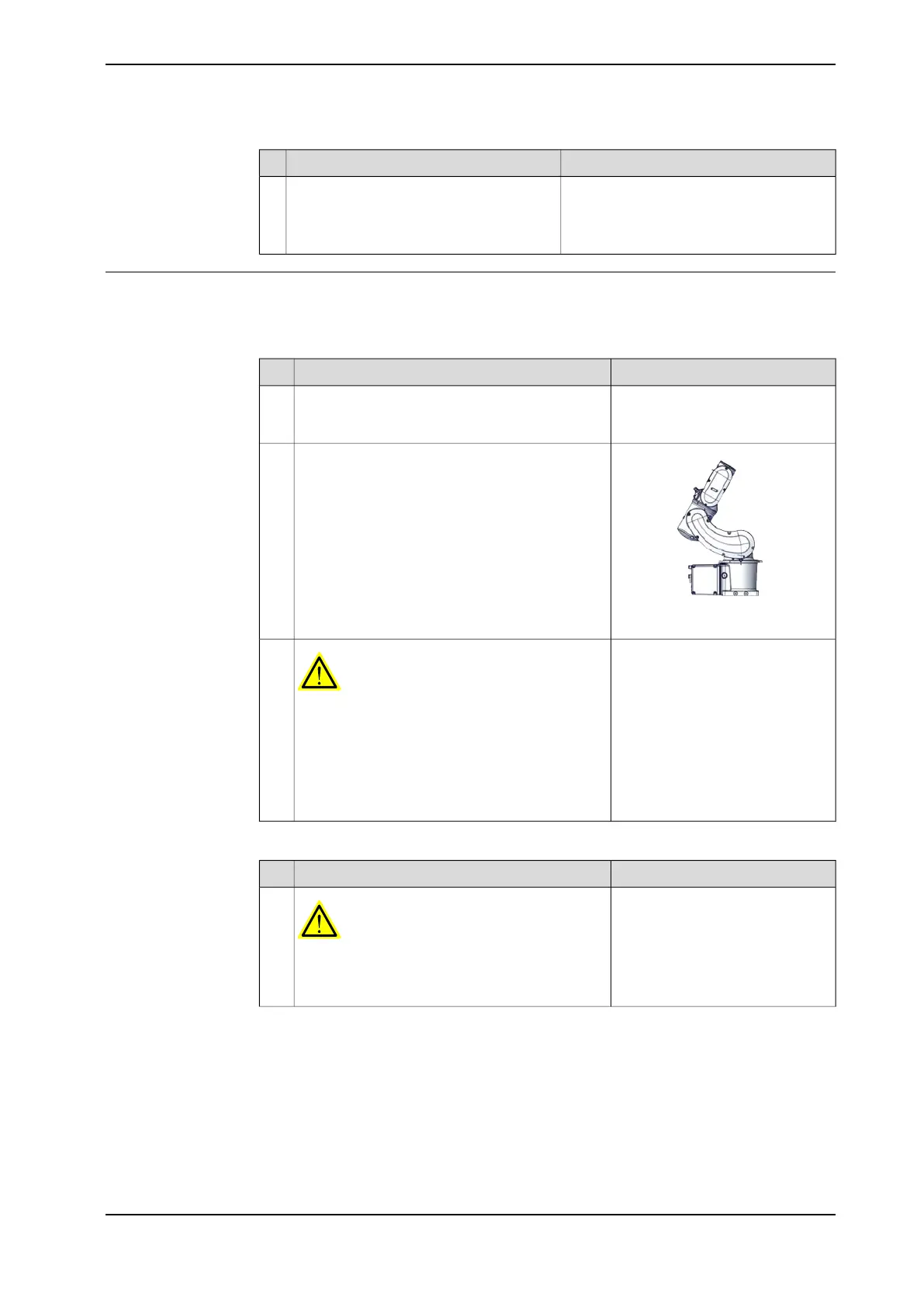
1
xx2200000550
Jog the robot to the specified position:
• Axis 1: 0°
• Axis 2: -60°
• Axis 3: 0°
• Axis 4: 0°
• Axis 5: 0°
• Axis6: No significance
2
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the safeguarded
space.
3
Removing the covers
NoteAction
DANGER
Make sure that all supplies for electrical power,
hydraulic pressure, and air pressure are turned
off.
1
Continues on next page
Product manual - IRB 1010 247
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
5 Repair
5.5.1 Replacing the axis-2 drive unit
Continued