NoteAction
xx2200000100
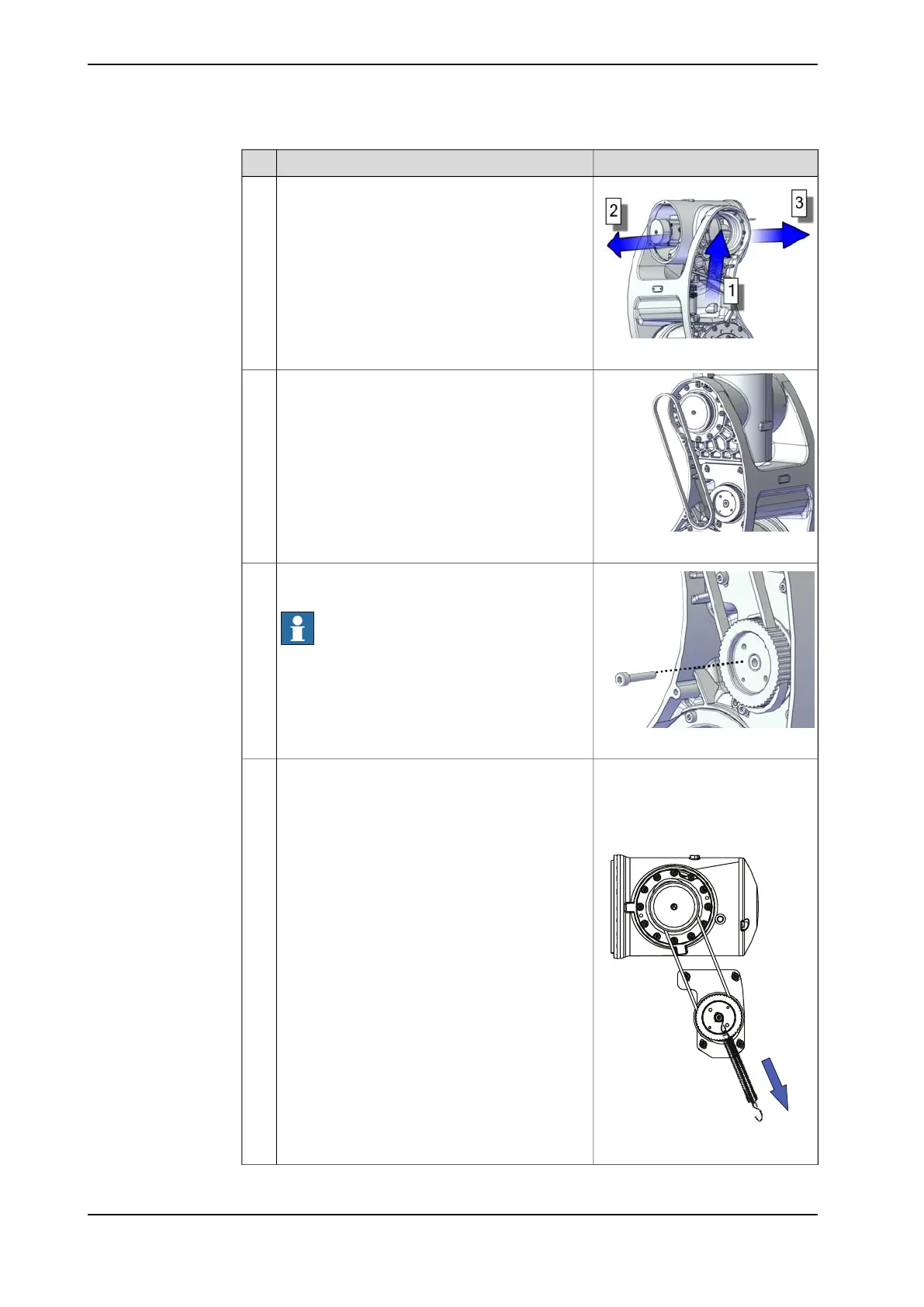
Route the cable package.
• Route the cable package up into the axis
4 (direction 1).
• Pull the axis-4 motor connectors out from
the robot rear (direction 2).
• Pull the main cable harness out from the
axis 3-4 assembly unit and to the wrist unit
direction (direction 3).
4
xx2200000099
Install the timing belt to the pulleys and verify that
the belt runs correctly in the grooves of the pul-
leys.
5
xx2200000544
Install an M4x20 or longer adjustment screw to
the motor.
Note
Do not insert the entire screw to the hole.
The screw shall be installed with proper force to
avoid shaft rotation.
6
Initial referenced force for used
belt: 14.1±1 N (for reference only)
Use a handheld dynamometer hooking to the
screw and pull the dynamometer to reach the ini-
tial referenced force.
7
Initial referenced force for new belt:
20.2±1 N
xx2200000545
Continues on next page
260 Product manual - IRB 1010
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
5 Repair
5.5.2 Replacing the axis-3 motor
Continued