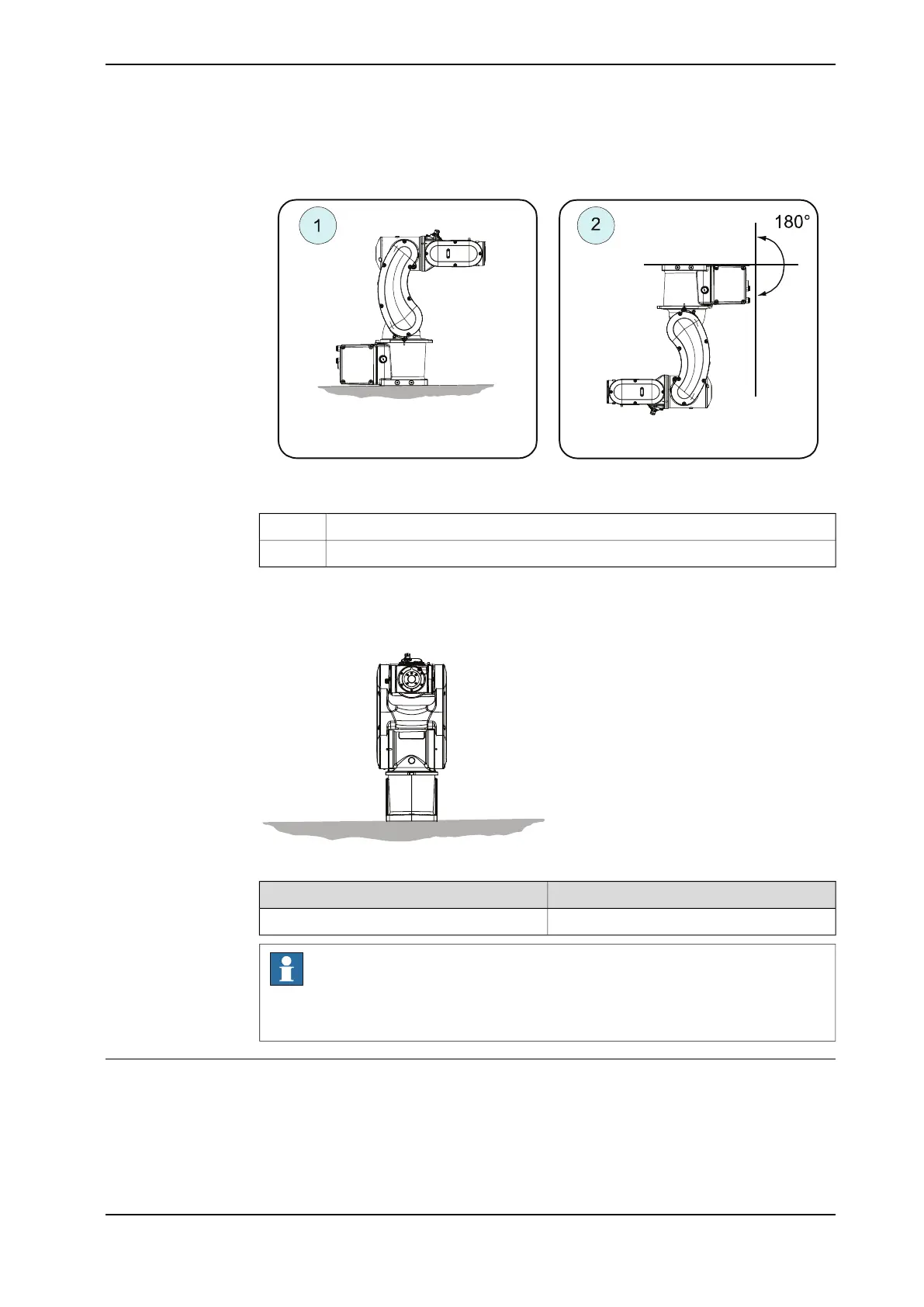
Examples of mounting angles tilted around the Y axis (Gravity Beta)
xx2200000482
Floor mountedPos 1
Mounting angle 180° (Suspended)Pos 2
Examples of mounting angles tilted around the X axis (Gravity Alpha)
The following illustration shows the IRB 120, but the same principle applies for all
robots.
xx2200000535
Gravity AlphaMounting angle
00° (Floor mounted)
Note
For suspended robots (180°), it is recommended to use Gravity Beta instead of
Gravity Alpha.
Defining the system parameters in RobotWare
The value of the system parameters that define the mounting angle must be
redefined when changing the mounting angle of the robot. The parameters belong
to the type Robot, in the topic Motion.
Continues on next page
Product manual - IRB 1010 59
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.4 Setting the system parameters for an inverted or a tilted robot
Continued