Repairs Calibration
Product Manual IRB 640 49
14. Move the sensor and continue the calibration procedure for the other axes.
15. When all the axes have been adjusted, the resolver values are stored by executing
the following commands on the teach pendant.
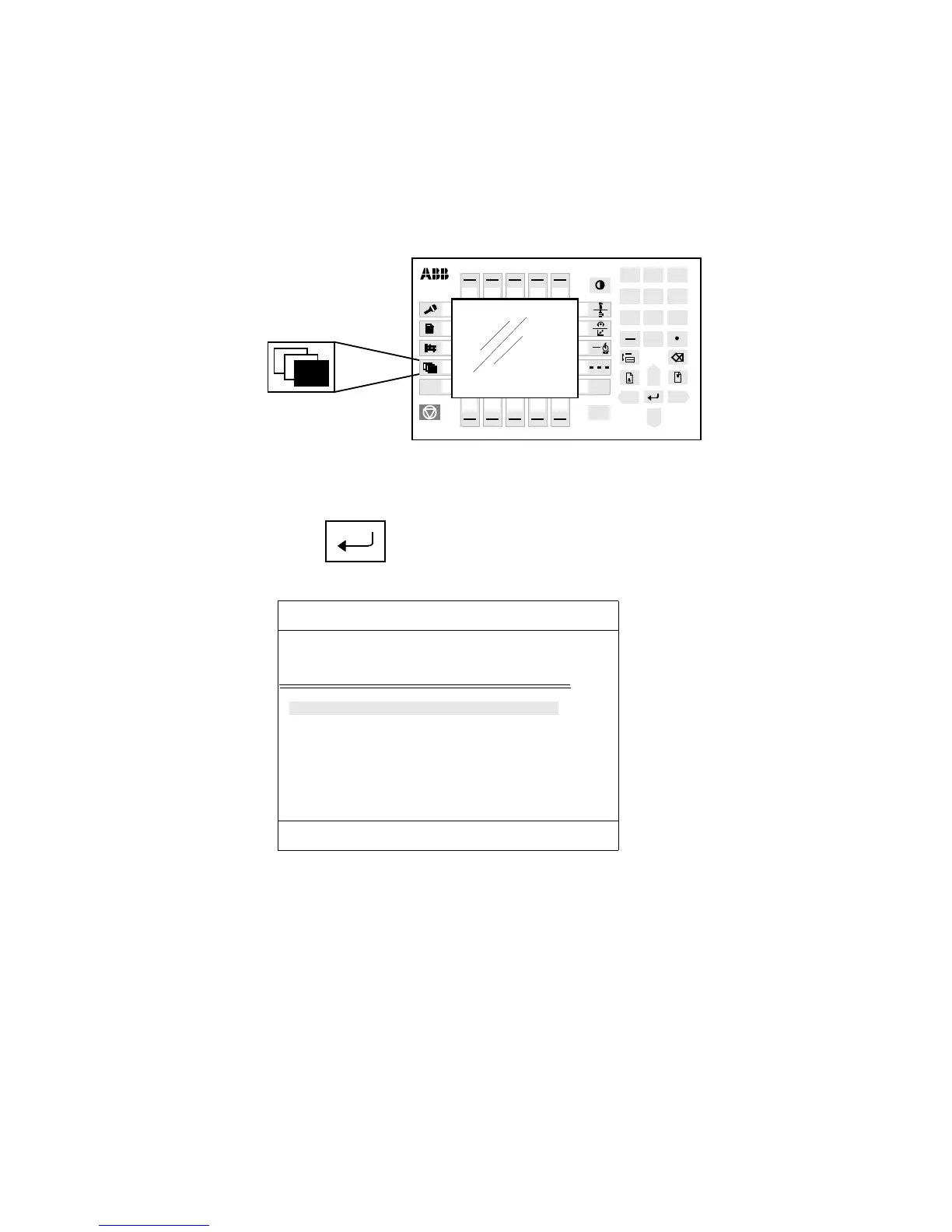
16. Press the Misc. window key (see Figure 13).
Figure 13 The Misc. window key from which the Service window can be selected
17. Select Service in the dialog box shown on the display.
18. Press Enter .
19. Select View: Calibration. The window in Figure 14 appears.
Figure 14 The window shows whether or not the robot system units are calibrated.
The calibration status can be any of the following:
- Synchronised
All axes are calibrated and their positions are known. The unit is ready for use.
- Not updated Rev. Counter
All axes are fine-calibrated but one (or more) of the axes has a counter that is
NOT updated. That axis, or those axes, must therefore be updated as
described in Chapter 9.4, Setting the calibration marks on the manipulator.
2
1
23
0
1
456
789
P3
P1
P2
File Edit View Calib
1(1)
Service Calibration
Unit Status
Robot Not Calibrated